 |
 |
|
||||
|
By
Wikipedia,
Moment of inertia, also called mass moment of inertia or the angular mass, (SI units kg m) is a measure of an object's resistance to changes in its rotation rate. It is the rotational analog of mass. That is, it is the inertia of a rigid rotating body with respect to its rotation. The moment of inertia plays much the same role in rotational dynamics as mass does in basic dynamics, determining the relationship between angular momentum and angular velocity, torque and angular acceleration, and several other quantities. While a simple scalar treatment of the moment of inertia suffices for many situations, a more advanced tensor treatment allows the analysis of such complicated systems as spinning tops and gyroscopic motion. The symbol I and sometimes J are usually used to refer to the moment of inertia. The concept was introduced by Euler in his book a Theoria motus corporum solidorum seu rigidorum in 1730. In this book, he discussed the moment of inertia and many related concepts, such as the principal axis of inertia. OverviewThe moment of inertia of an object about a given axis describes how difficult it is to change its angular motion about that axis. For example, consider two discs, A and B, made of the same material and of equal mass. Disc A is larger in diameter but thinner than B. It requires more effort to accelerate disc A (change its angular velocity) because its mass is distributed farther from its axis of rotation: mass that is farther out from that axis must, for a given angular velocity, move more quickly than mass closer in. In this case, disc A has a larger moment of inertia than disc B.
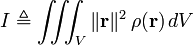
The moment of inertia of an object can change if its shape changes. A skater who begins a spin with arms outstretched provides a striking example. By pulling in her arms, she reduces her moment of inertia, causing her to spin faster (by the conservation of angular momentum). The moment of inertia has two forms, a scalar form I (used when the axis of rotation is known) and a more general tensor form that does not require knowing the axis of rotation. The scalar moment of inertia I (often called simply the "moment of inertia") allows a succinct analysis of many simple problems in rotational dynamics, such as objects rolling down inclines and the behavior of pulleys. For instance, while a block of any shape will slide down a frictionless decline at the same rate, rolling objects may descend at different rates, depending on their moments of inertia. A hoop will descend more slowly than a solid disk of equal mass and radius because more of its mass is located far from the axis of rotation, and thus needs to move faster if the hoop rolls at the same angular velocity. However, for (more complicated) problems in which the axis of rotation can change, the scalar treatment is inadequate, and the tensor treatment must be used (although shortcuts are possible in special situations). Examples requiring such a treatment include gyroscopes, tops, and even satellites, all objects whose alignment can change. The moment of inertia can also be called the mass moment of inertia (especially by mechanical engineers) to avoid confusion with the second moment of area, which is sometimes called the moment of inertia (especially by structural engineers) and denoted by the same symbol I. The easiest way to differentiate these quantities is through their units. In addition, the moment of inertia should not be confused with the polar moment of inertia, which is a measure of an object's ability to resist torsion (twisting). Scalar moment of inertiaDefinitionA simple definition of the moment of inertia (with respect to a given axis of rotation) of any object, be it a point mass or a 3D-structure, is given by: where m is mass and r is the perpendicular distance to the axis of rotation. Detailed AnalysisThe (scalar) moment of inertia of a point mass rotating about a known axis is defined by The moment of inertia is additive. Thus, for a rigid body consisting of N point masses mi with distances ri to the rotation axis, the total moment of inertia equals the sum of the point-mass moments of inertia: For a solid body described by a mass density function, ρ(r), the moment of inertia about a known axis can be calculated by integrating the square of the distance (weighted by the mass density) from a point in the body to the rotation axis: where
Based on dimensional analysis alone, the moment of inertia of a non-point object must take the form: where
Inertial constants are used to account for the differences in the placement of the mass from the center of rotation. Examples include:
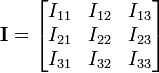
For more examples, see the List of moments of inertia. Parallel axis theoremOnce the moment of inertia has been calculated for rotations about the center of mass of a rigid body, one can conveniently recalculate the moment of inertia for all parallel rotation axes as well, without having to resort to the formal definition. If the axis of rotation is displaced by a distance R from the center of mass axis of rotation (e.g. spinning a disc about a point on its periphery, rather than through its center,) the displaced and center-moment of inertia are related as follows: This theorem is also known as the parallel axes rule and is a special case of Steiner's parallel-axis theorem. Composite bodiesIf a body can be decomposed (either physically or conceptually) into several constituent parts, then the moment of inertia of the body about a given axis is obtained by summing the moments of inertia of each constituent part around the same given axis. Equations involving the moment of inertiaThe rotational kinetic energy of a rigid body can be expressed in terms of its moment of inertia. For a system with N point masses mi moving with speeds vi, the rotational kinetic energy T equals where ω is the common angular velocity (in radians per second). The final expression I ω / 2 also holds for a mass density function with a generalization of the above derivation from a discrete summation to an integration. In the special case where the angular momentum vector is parallel to the angular velocity vector, one can relate them by the equation where L is the angular momentum and ω is the angular velocity. However, this equation does not hold in many cases of interest, such as the torque-free precession of a rotating object, although its more general tensor form is always correct. When the moment of inertia is constant, one can also relate the torque on an object and its angular acceleration in a similar equation: where τ is the torque and α is the angular acceleration. Moment of inertia tensorFor the same object, different axes of rotation will have different moments of inertia about those axes. In general, the moments of inertia are not equal unless the object is symmetric about all axes. The moment of inertia tensor is a convenient way to summarize all moments of inertia of an object with one quantity. It may be calculated with respect to any point in space, although for practical purposes the center of mass is most commonly used. DefinitionFor a rigid object of N point masses mk, the moment of inertia tensor is given by
Its components are defined as where
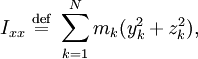
Note that, by the definition, I is a symmetric tensor. The diagonal elements, also called the principal moments of inertia, are more succinctly written as while the off-diagonal elements, also called the products of inertia, are
Here Ixx denotes the moment of inertia around the x-axis when the objects are rotated around the x-axis, Ixy denotes the moment of inertia around the y-axis when the objects are rotated around the x-axis, and so on. These quantities can be generalized to an object with distributed mass, described by a mass density function, in a similar fashion to the scalar moment of inertia. One then has where Derivation of the tensor componentsThe distance r of a particle at
This is exactly the formula given below for the moment of inertia in the case of a single particle. For multiple particles we need only recall that the moment of inertia is additive in order to see that this formula is correct. Reduction to scalarFor any axis The range of both summations correspond to the three Cartesian coordinates. The following equivalent expression avoids the use of transposed vectors which are not supported in maths libraries because internally vectors and their transpose are stored as the same linear array, However it should be noted that although this equation is mathematically equivalent to the equation above for any matrix, inertia tensors are symmetrical. This means that it can be further simplified to: Principal moments of inertiaBy the spectral theorem, since the moment of inertia tensor is real and symmetric, it is possible to find a Cartesian coordinate system in which it is diagonal, having the form where the coordinate axes are called the principal axes and the constants I1, I2 and I3 are called the principal moments of inertia. The unit vectors along the principal axes are usually denoted as (e1, e2, e3). When all principal moments of inertia are distinct, the principal axes are uniquely specified. If two principal moments are the same, the rigid body is called a symmetrical top and there is no unique choice for the two corresponding principal axes. If all three principal moments are the same, the rigid body is called a spherical top (although it need not be spherical) and any axis can be considered a principal axis, meaning that the moment of inertia is the same about any axis. The principal axes are often aligned with the object's symmetry axes. If a rigid body has an axis of symmetry of order m, i.e., is symmetrical under rotations of 360°/m about a given axis, the symmetry axis is a principal axis. When m > 2, the rigid body is a symmetrical top. If a rigid body has at least two symmetry axes that are not parallel or perpendicular to each other, it is a spherical top, e.g., a cube or any other Platonic solid. A practical example of this mathematical phenomenon is the routine automotive task of balancing a tire, which basically means adjusting the distribution of mass of a car wheel such that its principal axis of inertia is aligned with the axle so the wheel does not wobble. Parallel axis theoremOnce the moment of inertia tensor has been calculated for rotations about the center of mass of the rigid body, there is a useful labor-saving method to compute the tensor for rotations offset from the center of mass. If the axis of rotation is displaced by a vector R from the center of mass, the new moment of inertia tensor equals where M is the total mass of the rigid body, E3 is the 3 × 3 identity matrix, and Rotational symmetryUsing the above equation to express all moments of inertia in terms of integrals of variables either along or perpendicular to the axis of symmetry usually simplifies the calculation of these moments considerably. Other mechanical quantitiesComparison with covariance matrixThe moment of inertia tensor about the center of mass of a 3 dimensional rigid body is related to the covariance matrix of a trivariate random vector whose probability density function is proportional to the pointwise density of the rigid body by: where n is the number of points. The structure of the moment-of-inertia tensor comes from the fact that it is to be used as a bilinear form on rotation vectors in the form Each element of mass has a kinetic energy of The velocity of each element of mass is and similarly Thus plugging in the definition of See also
External links
Text from Wikipedia is available under the Creative Commons Attribution/Share-Alike License; additional terms may apply.
Published in July 2009. Click here to read more articles related to aviation and space!
|

 |
|
Copyright 2004-2026 © by Airports-Worldwide.com, Vyshenskoho st. 36, Lviv 79010, Ukraine Legal Disclaimer |




 is the radius used in determining the moment.
is the radius used in determining the moment.




 .
.

 and
and

 is their
is their  from the axis of rotation passing through the origin in the
from the axis of rotation passing through the origin in the  direction is
direction is  . By using the formula
. By using the formula  This is a
This is a ![{I} = m [n_1,n_2,n_3]\begin{bmatrix}y^2+z^2 & -xy & -xz \\
-y x & x^2+z^2 & -yz \\
-zx & -zy & x^2+y^2
\end{bmatrix} \begin{bmatrix}n_1 \\n_2\\
n_3
\end{bmatrix}](http://upload.wikimedia.org/math/d/a/c/dacd5f0fa6ccbb3553e0d656e4a58b2f.png) .
. , represented as a column vector with elements ni, the scalar form I can be calculated from the tensor form I as
, represented as a column vector with elements ni, the scalar form I can be calculated from the tensor form I as



![\mathbf{I}^{\mathrm{displaced}} = \mathbf{I}^{\mathrm{center}} + M \left[ \left(\mathbf{R} \cdot \mathbf{R}\right) \mathbf{E}_{3} - \mathbf{R} \otimes \mathbf{R} \right]](http://upload.wikimedia.org/math/2/c/8/2c861957dd3f40ee86ebef4e2e1b4de9.png)
 is the
is the 


 where r is a vector from the center of rotation to that element of mass. The
where r is a vector from the center of rotation to that element of mass. The ![\omega\times r = [r]_\times^T\omega\,\!](http://upload.wikimedia.org/math/b/1/1/b11efa29abd322abff5a6d1fcd30c140.png)
![(\omega\times r)^T = ([r]_\times \omega)^T = \omega^T [r]_\times^T. \,\!](http://upload.wikimedia.org/math/0/b/5/0b50e9086586fa9ec0a41415635f06b9.png)
![|v|^2 = (\omega\times r)^T(\omega\times r)=\omega^T [r]_\times^T [r]_\times \omega \,\!](http://upload.wikimedia.org/math/5/4/8/548ae86dadf9811133ac1149e993bfd6.png)
![[\cdot]_\times](http://upload.wikimedia.org/math/1/3/5/13500ce53c18a4912d92f5e3a9d88281.png) the
the ![[r]_\times^T [r]_\times](http://upload.wikimedia.org/math/9/4/6/94618d209ab2b4b9d2fa6f5c2901f06c.png) term leads directly to the structure of the moment tensor.
term leads directly to the structure of the moment tensor.