 |
 |
|
||||
|
By
Wikipedia, The center of mass of a system of particles is a specific point at which, for many purposes, the system's mass behaves as if it were concentrated. The center of mass is a function only of the positions and masses of the particles that comprise the system. In the case of a rigid body, the position of its center of mass is fixed in relation to the object (but not necessarily in contact with it). In the case of a loose distribution of masses in free space, such as, say, shot from a shotgun, the position of the center of mass is a point in space among them that may not correspond to the position of any individual mass. In the context of an entirely uniform gravitational field, the center of mass is often erroneously called the center of gravity — the point where gravity can be said to act (although in uniform fields they have the same geometric location). The center of mass of a body does not always coincide with its intuitive geometric center, and one can exploit this freedom. Engineers try to design a sports car's center of mass as low as possible to make the car handle better. When high jumpers perform a "Fosbury Flop", they bend their body in such a way that it is possible for the jumper to clear the bar while his or her center of mass does not. The center of momentum frame is an inertial frame defined as the inertial frame in which the center of mass of a system is at rest. A specific center of momentum frame in which the center of mass is not only at rest, but also at the origin of the coordinate system, is sometimes called the center of mass frame, or center of mass coordinate system. DefinitionThe center of mass R of a system of particles is defined as the average of their positions, ri, weighted by their masses, mi: For a continuous distribution with mass density If an object has uniform density then its center of mass is the same as the centroid of its shape. Examples
HistoryThe concept of center of mass was first introduced by the ancient Greek mathematician, physicist, and engineer Archimedes of Syracuse. Archimedes showed that the torque exerted on a lever by weights resting at various points along the lever is the same as what it would be if all of the weights were moved to a single point — their center of mass. In work on floating bodies he demonstrated that the orientation of a floating object is the one that makes its center of mass as low as possible. He developed mathematical techniques for finding the centers of mass of objects of uniform density of various well-defined shapes, in particular a triangle, a hemisphere, and a frustum (of a circular paraboloid). In the Middle Ages, theories on the center of mass were further developed by Abū Rayhān al-Bīrūnī, al-Razi (Latinized as Rhazes), Omar Khayyám, and al-Khazini. Derivation of center of massThe following equations of motion assume that there is a system of particles governed by internal and external forces. An internal force is a force caused by the interaction of the particles within the system. An external force is a force that originates from outside the system, and acts on one or more particles within the system. The external force need not be due to a uniform field. For any system with no external forces, the center of mass moves with constant velocity. This applies for all systems with classical internal forces, including magnetic fields, electric fields, chemical reactions, and so on. More formally, this is true for any internal forces that satisfy the weak form of Newton's Third Law. The total momentum for any system of particles is given by Where M indicates the total mass, and vcm is the velocity of the center of mass. This velocity can be computed by taking the time derivative of the position of the center of mass. An analogue to Newton's Second Law is Where F indicates the sum of all external forces on the system, and acm indicates the acceleration of the center of mass. Letting the total internal force of the system. where M is the total mass of the system and R is a vector yet to be defined, since: and then We therefore have a vectorial definition for center of mass in terms of the total forces in the system. This is particularly useful for two-body systems. Alternative derivationConsider first two bodies, with masses m1 and m2, and position vectors r1 and r2. Write M = m1 + m2 for the total mass of the 2-body system, and R for the position vector of the center of mass. It is reasonable to require, for any system of masses, that the center of mass lie within the convex hull of the system. In particular, for a pair of mass points, this means that the tip of R must lie on the line segment joining the tips of r1 and r2. By geometry, R - r1 = k(r2 - R) for some positive constant k. Taking magnitudes on both sides of this equation, we get d1 = kd2, where d1 is the distance from the center of mass to body 1, and d2 is the distance from the center of mass to body 2. The constant k should obviously depend only on the masses m1 and m2, and we will examine the nature of this dependence. Assuming the total mass M is nonzero, it is clear that if m2 = 0, the center of mass should coincide with body 1, and d1 = 0. This means d2 = D, the total distance between the two bodies, and m1 = M. Symmetry demands that these relations remain true when the subscripts 1 and 2 are interchanged everywhere. The simplest model satisfying these requirements is the linear one, d1 = (D/M)m2 and d2 = (D/M)m1. Under this model, we have k = d1/d2 = m2/m1. Therefore, after multiplying our vector equation by m1, we find that m1(R - r1) = m2(r2 − R), or (m1 + m2)R = m1r1 + m2r2. Thus, Now suppose there is a third body, of mass m3 and position r3. Temporarily break the symmetry between the three bodies, and define the 3-body center of mass as the 2-body center of mass determined by body 3 together with a single body of mass M0 = m1 + m2 placed at the center of mass of bodies 1 and 2, whose position vector we now denote by R0. The formula derived above gives Since R turns out to be symmetric in the mi and ri, it would not have mattered had we started by combining bodies 2 and 3, or bodies 1 and 3, instead of bodies 1 and 2. This kind of reasoning clearly extends to any number of masses, and yields the formula So our simple model of the 2-body center of mass uniquely and consistently determines the corresponding formula in any number of mass points. Writing M = m1 + m2 + ... + mn, the above formula for the center of mass may be expressed in the form Differentiating both sides yields the principle that i.e., the sum of the momenta of a number of bodies is the momentum of their center of mass. It is this principle that gives precise expression to the intuitive notion that the system as a whole behaves like a mass of M placed at R, and justifies our simple linear model of the one-dimensional center of mass. Rotation and centers of mass
The center of mass is often called the center of gravity because any uniform gravitational field g acts on a system as if the mass M of the system were concentrated at the center of mass R. This is seen in at least two ways:
If the gravitational field acting on a body is not uniform, then the center of mass does not necessarily exhibit these convenient properties concerning gravity. As the situation is put in Feynman's influential textbook The Feynman Lectures on Physics:
Many authors have been less careful, stating that when gravity is not uniform, "the center of gravity" departs from the CM. This usage seems to imply a well-defined "center of gravity" concept for non-uniform fields. Symon, in his textbook Mechanics, shows that the center of gravity of an extended body must always be defined relative to an external point, at which location resides a point mass that is exerting a gravitational force on the object in question. In fact, as Symon says:
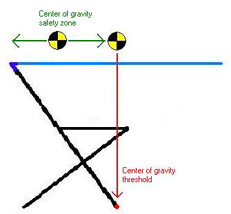
Even when considering tidal forces on planets, it is sufficient to use centers of mass to find the overall motion. In practice, for non-uniform fields, one simply does not speak of a "center of gravity". CM frameThe angular momentum vector for a system is equal to the angular momentum of all the particles around the center of mass, plus the angular momentum of the center of mass, as if it were a single particle of mass M: This is a corollary of the Parallel Axis Theorem. EngineeringAeronautical significanceThe center of mass is an important point on an aircraft, which significantly affects the stability of the aircraft. To ensure the aircraft is safe to fly, it is critical that the center of mass fall within specified limits. This range varies by aircraft, but as a rule of thumb it is centered about a point one quarter of the way from the wing leading edge to the wing trailing edge (the quarter chord point). If the center of mass is ahead of the forward limit, the aircraft will be less maneuverable, possibly to the point of being unable to rotate for takeoff or flare for landing. If the center of mass is behind the aft limit, the moment arm of the elevator is reduced, which makes it more difficult to recover from a stalled condition. The aircraft will be more maneuverable, but also less stable, and possibly so unstable that it is impossible to fly. Barycenter in astrophysics and astronomyThe barycenter (or barycentre; from the Greek βαρύκεντρον) is the point between two objects where they balance each other. For example, it is the center of mass where two or more celestial bodies orbit each other. When a moon orbits a planet, or a planet orbits a star, both bodies are actually orbiting around a point that lies outside the center of the primary (the larger body). For example, the moon does not orbit the exact center of the earth, but a point on a line between the Earth and the Moon approximately 1710 km below the surface of the Earth, where their respective masses balance. This is the point about which the Earth and Moon orbit as they travel around the Sun. The barycenter is one of the foci of the elliptical orbit of each body. This is an important concept in the fields of astronomy, astrophysics, and the like (see two-body problem). In a simple two-body case, r1, the distance from the center of the primary to the barycenter is given by: where:
r1 is essentially the semi-major axis of the primary's orbit around the barycenter—and r2 = a − r1 the semi-major axis of the secondary's orbit. Where the barycenter is located within the more massive body, that body will appear to "wobble" rather than following a discernible orbit. The following table sets out some examples from our solar system. Figures are given rounded to three significant figures. The last two columns show R1, the radius of the first (more massive) body, and r1/R1, the ratio of the distance to the barycenter and that radius: a value less than one shows that the barycenter lies inside the first body.
If m1 ≫ m2—which is true for the Sun and any planet—then the ratio r1/R1 approximates to: Hence, the barycenter of the Sun-planet system will lie outside the Sun only if: That is, where the planet is heavy and far from the Sun. If Jupiter had Mercury's orbit (57,900,000 km, 0.387 AU), the Sun-Jupiter barycenter would be only 5,500 km from the center of the Sun (r1/R1 ~ 0.08). But even if the Earth had Eris' orbit (68 AU), the Sun-Earth barycenter would still be within the Sun (just over 30,000 km from the center). To calculate the actual motion of the Sun, you would need to sum all the influences from all the planets, comets, asteroids, etc. of the solar system (see n-body problem). If all the planets were aligned on the same side of the Sun, the combined center of mass would lie about 500,000 km above the Sun's surface. The calculations above are based on the mean distance between the bodies and yield the mean value r1. But all celestial orbits are elliptical, and the distance between the bodies varies between the apses, depending on the eccentricity, e. Hence, the position of the barycenter varies too, and it is possible in some systems for the barycenter to be sometimes inside and sometimes outside the more massive body. This occurs where: Note that the Sun-Jupiter system, with eJupiter = 0.0484, just fails to qualify: 1.05 ≯ 1.07 > 0.954. AnimationsImages are representative, not simulated.
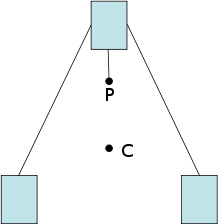
Locating the center of mass of an arbitrary 2D physical shapeThis method is useful when one wishes to find the centroid of a complex planar shape with unknown dimensions. It relies on finding the center of mass of a thin body of homogenous density having the same shape as the complex planar shape. Locating center of massThis is a method of determining the center of mass of an L-shaped object.
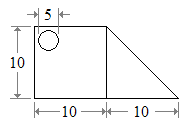
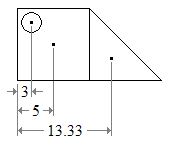
Locating the center of mass of a composite shapeThis method is useful when one wishes to find the location of the centroid or center of mass of an object that is easily divided into elementary shapes, whose centers of mass are easy to find (see List of centroids). Here the center of mass will only be found in the x direction. The same procedure may be followed to locate the center of mass in the y direction.
The center of mass of this figure is at a distance of 8.5 units from the left corner of the figure. Locating the center of mass by tracing around the perimeter of the shape
A direct development of the planimeter known as an integraph, or integerometer (though a better term is probably moment planimeter), can be used to establish the position of the centroid or center of mass of an irregular shape. This method can be applied to a shape with an irregular, smooth or complex boundary where other methods are too difficult. It was regularly used by ship builders to ensure the ship would not capsize. See Locating the center of mass by mechanical means. The following elegant proof of how a planimeter works is due largely to O. Henrici and can be found in O. Henrici, Report on Planimeters, British Assoc. for the Advancement of Science, Report of the 64th meeting, 1894, pp. 496-523. This paper also contains an interesting history of planimeters up through 1894.
Text from Wikipedia is available under the Creative Commons Attribution/Share-Alike License; additional terms may apply.
Published in August 2018. Click here to read more articles related to aviation and space!
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 |
|
Copyright 2004-2026 © by Airports-Worldwide.com, Vyshenskoho st. 36, Lviv 79010, Ukraine Legal Disclaimer |






 units.
units.
