 |
 |
|
||||
|
By
Wikipedia,
In classical mechanics, momentum (pl. momenta; SI unit kg·m/s, or, equivalently, N·s) is the product of the mass and velocity of an object (p = mv). For more accurate measures of momentum, see the section "modern definitions of momentum" on this page. It is sometimes referred to as linear momentum to distinguish it from the related subject of angular momentum. Linear momentum is a vector quantity, since it has a direction as well as a magnitude. Angular momentum is a pseudovector quantity because it gains an additional sign flip under an improper rotation. The total momentum of any group of objects remains the same unless outside forces act on the objects (law of conservation of momentum). Momentum is a conserved quantity, meaning that the total momentum of any closed system (one not affected by external forces) cannot change. This law is also true in special relativity. History of the conceptmōmentum was not merely the motion, which was mōtus, but was the power residing in a moving object, captured by today's mathematical definitions. A mōtus, "movement", was a stage in any sort of change, while velocitas, "swiftness", captured only speed. The Romans, due to limitations inherent in the Roman numeral system, were unable to go further with the perception. The concept of momentum in classical mechanics was originated by a number of great thinkers and experimentalists. The first of these was Ibn Sina (Avicenna) circa 1000, during the Islamic Renaissance who referred to impetus as proportional to weight times velocity. René Descartes later referred to mass times velocity as the fundamental force of motion. Galileo in his Two New Sciences used the Italian word "impeto." The question has been much debated as to what Isaac Newton contributed to the concept. The answer is apparently nothing, except to state more fully and with better mathematics what was already known. The first and second of Newton's Laws of Motion had already been stated by John Wallis in his 1670 work, Mechanica sive De Motu, Tractatus Geometricus: "the initial state of the body, either of rest or of motion, will persist" and "If the force is greater than the resistance, motion will result". Wallis uses momentum and vis for force. Newton's Philosophiæ Naturalis Principia Mathematica, when it was first published in 1686, showed a similar casting around for words to use for the mathematical momentum. His Definition II defines quantitas motus, "quantity of motion", as "arising from the velocity and quantity of matter conjointly", which identifies it as momentum. Thus when in Law II he refers to mutatio motus, "change of motion", being proportional to the force impressed, he is generally taken to mean momentum and not motion. It remained only to assign a standard term to the quantity of motion. The first use of "momentum" in its proper mathematical sense is not clear but by the time of Jenning's Miscellanea in 1721, four years before the final edition of Newton's Principia Mathematica, momentum M or "quantity of motion" was being defined for students as "a rectangle", the product of Q and V where Q is "quantity of material" and V is "velocity", s/t. Some languages, such as French and Italian, still lack a single term for momentum, and use a phrase such as the literal translation of "quantity of motion". Linear momentum of a particle
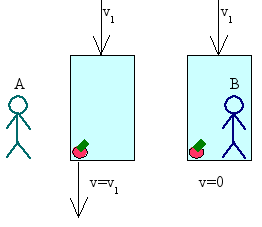
If an object is moving in any reference frame, then it has momentum in that frame. It is important to note that momentum is frame dependent. That is, the same object may have a certain momentum in one frame of reference, but a different amount in another frame. For example, a moving object has momentum in a reference frame fixed to a spot on the ground, while at the same time having 0 momentum in a reference frame attached to the object's center of mass. The amount of momentum that an object has depends on two physical quantities: the mass and the velocity of the moving object in the frame of reference. In physics, the usual symbol for momentum is a uppercase bold P (bold because it is a vector, uppercase to avoid confusion with pressure); so this can be written where P is the momentum, m is the mass and v is the velocity. Example: a model airplane of 1 kg travelling due north at 1 m/s in straight and level flight has a momentum of 1 kg m/s due north measured from the ground. To the dummy pilot in the cockpit it has a velocity and momentum of zero. According to Newton's second law, the rate of change of the momentum of a particle is proportional to the resultant force acting on the particle and is in the direction of that force. In the case of constant mass, and velocities much less than the speed of light, this definition results in the equation or just simply where F is understood to be the resultant. Example: a model airplane of 1 kg accelerates from rest to a velocity of 1 m/s due north in 1 s. The thrust required to produce this acceleration is 1 newton. The change in momentum is 1 kg m/s. To the dummy pilot in the cockpit there is no change of momentum. Its pressing backward in the seat is a reaction to the unbalanced thrust, shortly to be balanced by the drag. Linear momentum of a system of particlesRelating to mass and velocityThe linear momentum of a system of particles is the vector sum of the momenta of all the individual objects in the system: where P is the total momentum of the particle system, mi and vi are the mass and the velocity vector of the i-th object, and n is the number of objects in the system. It can be shown that, in the center of mass frame the momentum of a system is zero. Additionally, the momentum in a frame of reference that is moving at a velocity vcm with respect to that frame is simply: where:
This is known as Euler's first law. Relating to force - General equations of motion
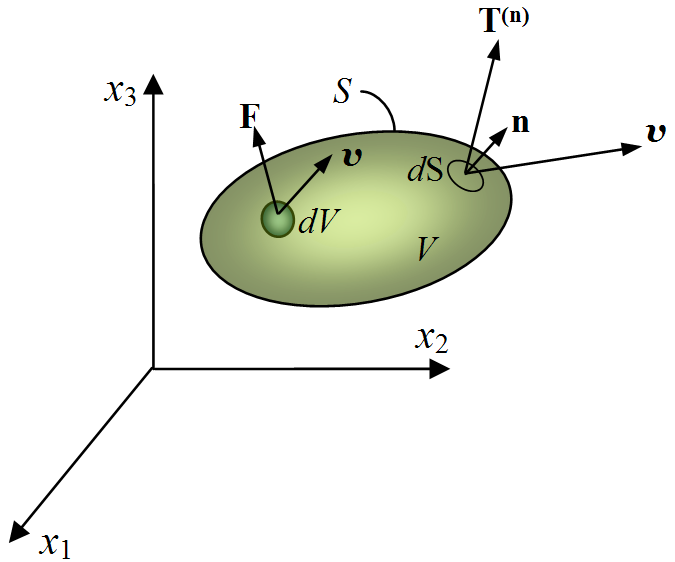
The linear momentum of a system of particles can also be defined as the product of the total mass This is commonly known as Newton's second law. For a more general derivation using tensors, we consider a moving body (see Figure), assumed as a continuum, occupying a volume By definition the stress vector is Using the Gauss's divergence theorem to convert a surface integral to a volume integral gives (we denote Now we only need to take care of the right side of the equation. We have to be careful, since we cannot just take the differential operator under the integral. This is because while the motion of the continuum body is taking place (the body is not necessarily solid), the volume we are integrating on can change with time too. So the above integral will be: Performing the differentiation in the first part, and applying the divergence theorem on the second part we obtain: Now the second term inside the integral is: ![\frac{d}{dt}\int \rho \,v_i \, dV=\int\rho\left[\frac{\partial}{\partial t}+v_k\partial_k\right]v_i \,dV +\int\left[\frac{\partial\rho}{\partial t}+\partial_k(\rho v_k)\right]v_i \,dV\,\!](http://upload.wikimedia.org/math/9/d/7/9d794e8f25492ea9dcb60c4fb43b884a.png)
We can easily recognize the two integral terms in the above equation. The first integral contains the Convective derivative of the velocity vector, and the second integral contains the change and flow of mass in time. Now lets assume that there are no sinks and sources in the system, that is mass is conserved, so this term is zero. Hence we obtain: putting this back into the original equation: For an arbitrary volume the integrand itself must be zero, and we have the Cauchy's equation of motion As we see the only extra assumption we made is that the system doesn't contain any mass sources or sinks, which means that mass is conserved. So this equation is valid for the motion of any continuum, even for that of fluids. If we are examining elastic continuums only then the second term of the convective derivative operator can be neglected, and we are left with the usual time derivative, of the velocity field. If a system is in equilibrium, the change in momentum with respect to time is equal to 0, as there is no acceleration. or using tensors, These are the equilibrium equations which are used in solid mechanics for solving problems of linear elasticity. In engineering notation, the equilibrium equations are expressed in Cartesian coordinates as Conservation of linear momentum
The law of conservation of linear momentum is a fundamental law of nature, and it states that the total momentum of a closed system of objects (which has no interactions with external agents) is constant. One of the consequences of this is that the center of mass of any system of objects will always continue with the same velocity unless acted on by a force from outside the system. Conservation of momentum is a mathematical consequence of the homogeneity (shift symmetry) of space (position in space is the canonical conjugate quantity to momentum). So, momentum conservation can be philosophically stated as "nothing depends on location per se". In analytical mechanics the conservation of momentum is a consequence of translational invariance of Lagrangian in the absence of external forces. It can be proven that the total momentum is a constant of motion by making an infinitesmial translation of Lagrangian and then equating it with non translated Lagrangian. This is a special case of Noether's theorem . In an isolated system (one where external forces are absent) the total momentum will be constant: this is implied by Newton's first law of motion. Newton's third law of motion, the law of reciprocal actions, which dictates that the forces acting between systems are equal in magnitude, but opposite in sign, is due to the conservation of momentum. Since position in space is a vector quantity, momentum (being the canonical conjugate of position) is a vector quantity as well - it has direction. Thus, when a gun is fired, the final total momentum of the system (the gun and the bullet) is the vector sum of the momenta of these two objects. Assuming that the gun and bullet were at rest prior to firing (meaning the initial momentum of the system was zero), the final total momentum must also equal 0. In an isolated system with only two objects, the change in momentum of one object must be equal and opposite to the change in momentum of the other object. Mathematically,
Momentum has the special property that, in a closed system, it is always conserved, even in collisions and separations caused by explosive forces. Kinetic energy, on the other hand, is not conserved in collisions if they are inelastic. Since momentum is conserved it can be used to calculate an unknown velocity following a collision or a separation if all the other masses and velocities are known. A common problem in physics that requires the use of this fact is the collision of two particles. Since momentum is always conserved, the sum of the momenta before the collision must equal the sum of the momenta after the collision: where:
Usually, we only know the velocities either before or after a collision and would like to also find out the opposite. Correctly solving this problem means you have to know what kind of collision took place. There are two basic kinds of collisions, both of which conserve momentum:
Elastic collisionsA collision between two pool balls is a good example of an almost totally elastic collision; a totally elastic collision exists only in theory. In addition to momentum being conserved when the two balls collide, the sum of kinetic energy before a collision must equal the sum of kinetic energy after: Since the 1/2 factor is common to all the terms, it can be taken out right away. Head-on collision (1 dimensional)In the case of two objects colliding head on we find that the final velocity obey Special case: m1>>m2Now consider the case when the mass of one body, say m1, is far greater than that of the other, m2 (m1>>m2). In that case, both m1+m2 and m1-m2 are approximately equal to m1. Using these approximations, the above formula reduces to Its physical interpretation is that in the case of a collision between two bodies, one of which is much more massive than the other, the lighter body ends up moving in the opposite direction with twice the original speed of the more massive body. Special case: m1=m2Another special case is when the collision is between two bodies of equal mass. Say body m1 moving at velocity v1 strikes body m2. Putting this case in the equation derived above we will see that after the collision, the body that was moving (m1) will start moving with velocity v2 and the mass m2 will start moving with velocity v1. So there will be an exchange of velocities. Now suppose one of the masses, say m2, was at rest. In that case after the collision the moving body, m1, will come to rest and the body that was at rest, m2, will start moving with the velocity that m1 had before the collision. That is Note that all of these observations are for an elastic collision. This phenomenon is demonstrated by Newton's cradle, one of the best known examples of conservation of momentum, a real life example of this special case. Multi-dimensional collisionsIn the case of objects colliding in more than one dimension, as in oblique collisions, the velocity is resolved into orthogonal components with one component perpendicular to the plane of collision and the other component or components in the plane of collision. The velocity components in the plane of collision remain unchanged, while the velocity perpendicular to the plane of collision is calculated in the same way as the one-dimensional case. For example, in a two-dimensional collision, the momenta can be resolved into x and y components. We can then calculate each component separately, and combine them to produce a vector result. The magnitude of this vector is the final momentum of the isolated system. Perfectly Inelastic collisionsA common example of a perfectly inelastic collision is when two snowballs collide and then stick together afterwards. This equation describes the conservation of momentum: It can be shown that a perfectly inelastic collision is one in which the maximum amount of kinetic energy is converted into other forms. For instance, if both objects stick together after the collision and move with a final common velocity, one can always find a reference frame in which the objects are brought to rest by the collision and 100% of the kinetic energy is converted. This is true even in the relativistic case and utilized in particle accelerators to efficiently convert kinetic energy into new forms of mass-energy (i.e. to create massive particles). Coefficient of RestitutionThe coefficient of restitution is defined as the ratio of relative velocity of separation to relative velocity of approach. It is a ratio hence it is a dimensionless quantity. The coefficient of restitution is given by: for two colliding objects, where
A perfectly elastic collision implies that CR is 1. So the relative velocity of approach is same as the relative velocity of separation of the colliding bodies. Inelastic collisions have (CR < 1). In case of a perfectly inelastic collision the relative velocity of separation of the centre of masses of the colliding bodies is 0. Hence after collision the bodies stick together after collision. ExplosionsAn explosion occurs when an object is divided into two or more fragments due to a release of energy. Note that kinetic energy in a system of explosion is not conserved because it involves energy transformation (i.e. kinetic energy changes into heat and acoustic energy). See the inelastic collision page for more details. Modern definitions of momentumMomentum in relativistic mechanicsIn relativistic mechanics, in order to be conserved, momentum must be defined as: where
Relativistic momentum can also be written as invariant mass times the object's proper velocity, defined as the rate of change of object position in the observer frame with respect to time elapsed on object clocks (i.e. object proper time). Relativistic momentum closely approximates Newtonian momentum:
Relativistic four-momentum as proposed by Albert Einstein arises from the invariance of four-vectors under Lorentzian translation. The four-momentum is defined as: where
The "length" of the vector is the mass times the speed of light, which is invariant across all reference frames: Momentum of massless objects Objects without a rest mass, such as photons, also carry momentum. The formula is: where
Generalization of momentum Momentum is the Noether charge of translational invariance. As such, even fields as well as other things can have momentum, not just particles. However, in curved space-time which is not asymptotically Minkowski, momentum isn't defined at all. Momentum in quantum mechanicsIn quantum mechanics, momentum is defined as an operator on the wave function. The Heisenberg uncertainty principle defines limits on how accurately the momentum and position of a single observable system can be known at once. In quantum mechanics, position and momentum are conjugate variables. For a single particle with no electric charge and no spin, the momentum operator can be written in the position basis as where:
This is a commonly encountered form of the momentum operator, though not the most general one. Momentum in electromagnetismElectric and magnetic fields possess momentum regardless of whether they are static or they change in time. It is a great surprise for freshmen who are introduced to the well known fact that the pressure where Light (visible, UV, radio) is an electromagnetic wave and also has momentum. Even though photons (the particle aspect of light) have no mass, they still carry momentum. This leads to applications such as the solar sail. Momentum is conserved in an electrodynamic system (it may change from momentum in the fields to mechanical momentum of moving parts). The treatment of the momentum of a field is usually accomplished by considering the so-called energy-momentum tensor and the change in time of the Poynting vector integrated over some volume. This is a tensor field which has components related to the energy density and the momentum density. The definition canonical momentum corresponding to the momentum operator of quantum mechanics when it interacts with the electromagnetic field is, using the principle of least coupling:
instead of the customary
where:
See alsoExternal links
Text from Wikipedia is available under the Creative Commons Attribution/Share-Alike License; additional terms may apply.
Published in July 2009. Click here to read more articles related to aviation and space!
|






 .
.
 of the system times the velocity of the center of mass
of the system times the velocity of the center of mass 

 at a time
at a time  , having a surface area
, having a surface area  , with defined traction or surface forces
, with defined traction or surface forces  acting on every point of the body surface, body forces
acting on every point of the body surface, body forces  per unit of volume on every point within the volume
per unit of volume on every point within the volume  prescribed throughout the body. Following the previous equation, The linear momentum of the system is:
prescribed throughout the body. Following the previous equation, The linear momentum of the system is:
 , then
, then
 as the differential operator):
as the differential operator):

![\frac{d}{dt}\int \rho \,v_i \, dV =\int \left[ \left(\rho\frac{\partial v_i}{\partial t}+v_i\frac{\partial \rho}{\partial t}\right)+\partial_k (\rho v_i v_k)\right]\, dV\,\!](http://upload.wikimedia.org/math/4/e/4/4e44e1941496c1c06479cb4d75320308.png)
 . Plugging this into the previous equation, and rearranging the terms, we get:
. Plugging this into the previous equation, and rearranging the terms, we get:
![\int_V \left[ \partial_j\sigma_{ij} + F_i - \rho \frac{D v_i}{Dt}\right]\, dV = 0\,\!](http://upload.wikimedia.org/math/8/7/6/876da7892eb3f24d98530a9793f397ae.png)

















 is the
is the  is the
is the  is the relative velocity between an object and an observer
is the relative velocity between an object and an observer is the
is the  at low speed
at low speed  .
.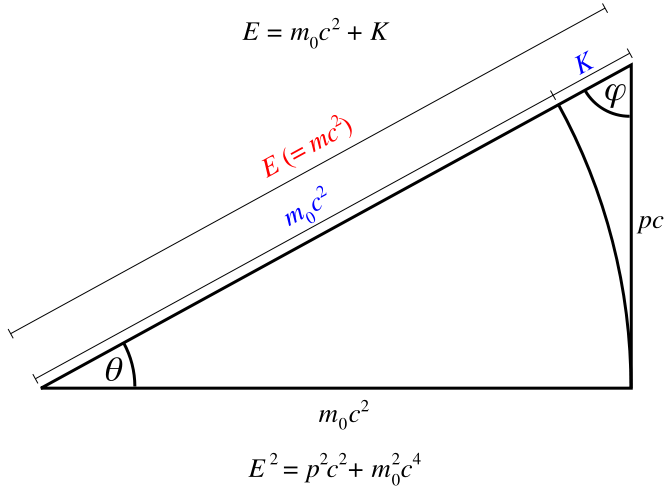
 , invariant mass
, invariant mass  . Please note that in the notation used by the diagram's creator, the invariant mass
. Please note that in the notation used by the diagram's creator, the invariant mass  is subscripted with a zero,
is subscripted with a zero, 
 is the
is the  component of the relativistic momentum,
component of the relativistic momentum,


 is
is  is the
is the 
 is the
is the  is the
is the  , defined as
, defined as  , is the
, is the  of an electrostatic (magnetostatic) field upon a metal sphere, cylindrical capacitor or ferromagnetic bar is:
of an electrostatic (magnetostatic) field upon a metal sphere, cylindrical capacitor or ferromagnetic bar is:![P_{static} ={W}=\left[ {\epsilon_0 \epsilon}{\frac{{\mathbf E}^2}{ {2}}}+{\frac{ 1}{ {\mu_0 \mu}}} {\frac{{\mathbf B}^2}{{2}}} \right],\,\!](http://upload.wikimedia.org/math/3/0/5/30543bfa191d5b8a97f02cd19083278d.png)
 ,
,  ,
,  , are the electromagnetic energy density, electric field, and magnetic field respectively. The electromagnetic pressure
, are the electromagnetic energy density, electric field, and magnetic field respectively. The electromagnetic pressure  may be sufficiently high to explode the capacitor. Thus electric and magnetic fields do carry momentum.
may be sufficiently high to explode the capacitor. Thus electric and magnetic fields do carry momentum. ,
, ,
, is the electromagnetic vector potential
is the electromagnetic vector potential its velocity
its velocity its charge.
its charge.
