|
 |
|
||||
|
By
Wikipedia,
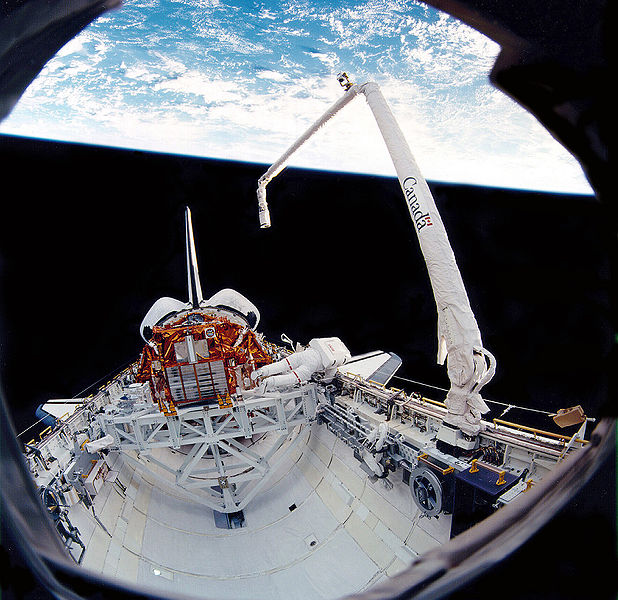
The Shuttle Remote Manipulator System (SRMS), or Canadarm (Canadarm 1), is a mechanical arm used on the Space Shuttle to maneuver a payload from the payload bay of the orbiter to its deployment position and then release it. It can also grapple a free-flying payload, maneuver it to the payload bay of the orbiter and berth it in the orbiter. It was first used on the second Space Shuttle mission STS-2, launched November 13, 1981. Since the destruction of Space Shuttle Columbia during STS-107, NASA has outfitted the Canadarm with the Orbiter Boom Sensor System, a boom containing instruments to inspect the exterior of the shuttle for damage to the thermal protection system. It is expected the CANADARM will play this role in all future shuttle missions. Specifications
The CANADARM arm is 15.2 metres (50 ft 3 in) long and 38 centimetres (15 inches) in diameter and has six degrees of freedom. It weighs 410 kg (905 pounds), and the total system weighs 450 kg (994 lb). The CANADARM has six joints that correspond roughly to the joints of the human arm, with shoulder yaw and pitch joints; an elbow pitch joint; and wrist pitch, yaw, and roll joints. The end effector is the unit at the end of the wrist that actually grabs, or grapples, the payload. The two lightweight boom segments are called the upper and lower arms. The upper boom connects the shoulder and elbow joints, and the lower boom connects the elbow and wrist joints. The CANADARM arm attaches to the orbiter payload bay longeron at the shoulder. Power and data connections are located at the shoulder MPM. Capabilities
The CANADARM is capable of deploying or retrieving payloads weighing up to 29 tons (65,000 pounds) in space, though the arm motors are unable to lift the arm's own weight when on the ground. The CANADARM can also retrieve, repair and deploy satellites; provide a mobile extension ladder for extravehicular activity crew members for work stations or foot restraints; and be used as an inspection aid to allow the flight crew members to view the orbiter's or payload's surfaces through a television camera on the CANADARM. The basic CANADARM configuration consists of a manipulator arm; an CANADARM display and control panel, including rotational and translational hand controllers at the orbiter aft flight deck flight crew station; and a manipulator controller interface unit that interfaces with the orbiter computer. Most of the time the arm operators see what they are doing by looking at the Advanced Space Vision System screen next to the controllers. One flight crew member operates the CANADARM from the aft flight deck control station, and a second flight crew member usually assists with television camera operations. This allows the CANADARM operator to view CANADARM operations through the aft flight deck payload and overhead windows and through the closed-circuit television monitors at the aft flight deck station. The Canadarm's hydraulics, whilst able to function smoothly in orbit, are not designed for functionality on the earths surface. NASA therefore developed a model of the arm for use at its training facility within the Johnson Space Center located in Houston, Texas. Development
SPAR Aerospace Ltd., a Canadian company, designed, developed, tested and built the CANADARM. (SPAR was later indirectly acquired by Richmond, B.C. based MacDonald Dettwiler and Associates (MDA), after going through the hands of American company Orbital Sciences Corp. and becoming a part of MD Robotics in Ontario, Canada.) Three systems were constructed within the Design, Development, Test and Evaluation contract, an Engineering Model to assist in the design and testing of the Canadarm, a Qualification Model that was subjected to environmental testing to "qualify" the design for flight and a Flight Unit. The main controls algorithms were developed by SPAR and by subcontractor Dynacon Inc. of Toronto. CAE Electronics Ltd. in Montreal provided the display and control Panel and the hand controllers located in the Shuttle aft flight deck. Other electronic interfaces, servoamplifiers and power conditioners located on the CANADARM were designed and built by SPAR at its Montreal factory. The graphite composite boom that provides the structural connection between the shoulder and the elbow joint and the similar boom that connects the elbow to the wrist were produced by General Dynamics in the U.S. Dilworth, Secord, Meagher and Associates Ltd. in Toronto was contracted to produce the Engineering model end effector then SPAR evolved the design and produced the Qualification and Flight units. The Shuttle flight software that monitors and controls the Canadarm was developed in Houston, Texas, by the Federal Systems Division of IBM. Rockwell International's Space Transportation Systems Division designed, developed, tested and built the systems used to attach the CANADARM to the payload bay of the orbiter. In all, five arms (arm 201, 202, 301, 302, and 303) were built and delivered to NASA. Three arms are currently in operation, with arm 302 lost in the Challenger accident. Usage
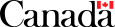
The CANADARM was first used on STS-2 in 1981, on board the Columbia, and has subsequently been used on over 50 shuttle missions. CANADARM arms have been installed on the four other shuttles - it was first flown on board the Challenger during STS-7 in 1983, and then in 1984 on Discovery during STS-41-D, which was Discovery's first flight. It was used on Atlantis first during STS-61-B. CANADARM 302 was lost during the Challenger disaster in 1986. An CANADARM was next used on Endeavour during STS-49, that vessel's first flight. The Space Shuttle Enterprise does not have the capability to use an CANADARM, as it lacks a functioning payload bay. Since the installation of the Canadarm2 on the International Space Station, the two arms have been used to hand over segments of the station for assembly from the CANADARM to the Canadarm2; the use of both elements in tandem has earned the nickname of 'Canadian Handshake' in the media. See also
External links
Text from Wikipedia is available under the Creative Commons Attribution/Share-Alike License; additional terms may apply.
Published in July 2009. Click here to read more articles related to aviation and space!
|

 |
|
Copyright 2004-2026 © by Airports-Worldwide.com, Vyshenskoho st. 36, Lviv 79010, Ukraine Legal Disclaimer |