|
 |
|
||||
|
By
Wikipedia,
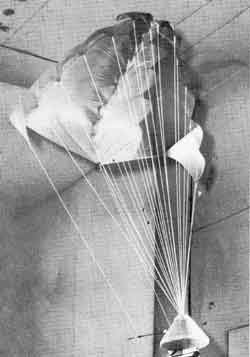
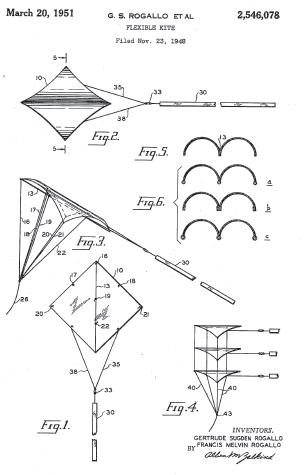
The Rogallo wing is a flexible type of airfoil. In 1948, Gertrude Rogallo, and her husband Francis Rogallo, a NASA engineer, invented a self-inflating flexible wing they called the Parawing, also known as the Rogallo Wing and flexible wing. NASA considered Rogallo's flexible wing as an alternative recovery system for the Gemini space capsule for possible use in other spacecraft landings, but the idea was dropped in 1964 in favor of using round parachutes. ConstructionA Rogallo wing is composed of two partial conic surfaces with both cones pointing forward. Slow Rogallo wings have wide, shallow cones. Fast subsonic and supersonic Rogallo wings have long, narrow cones. The Rogallo wing is a simple and inexpensive flying wing with remarkable properties. The wing itself is neither a kite, a glider, or a powered aircraft until the wing is tethered or arranged in a configuration that glides or is powered; that is, a holding system lets the wing be a specific type of aircraft. The Rogallo wing is most often seen in toy kites, but has been used to construct spacecraft parachutes, sport parachutes, ultralight powered aircraft like the trike and hang gliders. Rogallo had more than one patent concerning his finding; cylindrical formats, more-than two-lobes, various stiffenings, various nose angles, etc. were involved in his due-diligent expansion of his invention. The Charles Richard design and use of the Rogallo wing in the Paresev project resulted in an assemblage that became the stark template for what would blanket the world of hang gliding in the early 1970s on the Standard Rogallo hang glider. Furthermore, the fact that the wing is designed to bend and flex in the wind provides favorable dynamics analogous to a spring suspension. Flexibility allows the wing to be less susceptible to turbulence and provides a gentler flying experience than a similarly sized rigid-winged aircraft. The trailing edge of the wing -which is not stiffened- allows the wing to twist and provides aerodynamic stability without the need of a tail (empenage). Rogallo wing hang gliderIn 1961-1962 aeronautical engineer Barry Palmer foot-launched several versions of a framed Rogallo wing hang glider to continue the recreational and sporting spirit of hang gliding. Another player in the continuing evolution of the Rogallo wing hang hang glider was Australian John Dickenson, who in 1963 set to build a controllable water skiing kite/glider. Publicity from the Paresev tested and flown hang gliders sparked interest in the design among several tinkerers, including John Dickenson. Dickenson fashioned an airframe to fit on a Rogallo airfoil. Dickenson built a model based on the 'flexile wing' principle with a single hang point on an A frame:[6] He started with a framed Rogallo wing airfoil and added at first a U-frame (later an A-frame control bar) to it; it was composed of a keel, leading edges, a cross-bar and a fixed control frame. Weight-shift (mass-shift) was also used to control the glider. The flexible wing called Ski Wing was first flown in public at the Grafton Jacaranda Festival in September 1963 by Rod Fuller while towed behind a motorboat. The 'Australian Self-Soar Association' states that the first foot-launch of a hang glider in Australia was in 1972. In Torrance, California, Bill Moyes was assisted in a kited foot-launch by Joe Faust at a beach slope in 1971 or 1972. Moyes went on to build a company with his own Moyes trade-named Rogallo wing hang gliders also using the trapeze control frame he had seen in Dickenson's and Australian manned flat-kite ski kites. Bill Moyes and Bill Bennett exported new refinements of their own hang gliders throughout the world. ControlRogallo wing hang gliderHang gliders have been used with different forms of weight-shift control since Otto Lilienthal. The most common way to shift the center of gravity was to fly while suspended from the underarms by two parallel bars. Gottlob Espenlaub (1922), George Spratt (1929) and Barry Palmer (1962) used pendulum seats for the pilot. Interaction with the A-frame for hang gliders, trikes, and ultralights, provided various means of control of the Rogallo winged hang glider. Today, most Rogallo wings are also controlled by changing their pitch and roll by means of shifting its center of gravity. This is done by suspending the payload from one or more points beneath the wing and then moving the pendulumed mass of the payload (pilot and things else) mass left or right or forward or aft. Several control methods were studied in NASA for Rogallo wings from 1958 through the 1960s embodied in different versions of the Parawing. On Rogallo wing hang gliders, John W. Dickenson used a type of weight-shift control frame composed of a mounted triangular control frame under the wing. The pilot sat on a seat and was sometimes also harnessed about the torso. The pilot was suspended behind the triangular control frame which was used as a hand support to push and pull in order to shift the pilot's weight relative to the mass and attitude of the wing above. Rogallo kitesRogallo wing kites control pitch with a bridle that sets the wing's angle of attack. A bridle made of string is usually a loop reaching from the front to the end of the center strut of the A-frame. The user ties knots (usually a cow hitch) in the bridle to set the angle of attack. Mass-produced rogallo kites use a bridle that's a triangle of plastic film, with one edge heat-sealed to the central strut. Steerable Rogallo kites usually have a pair of bridles setting a fixed pitch, and use two strings, one on each side of the kite, to change the roll. Rogallo also developed a series of soft foil designs in the 60's which have been modified for traction kiting. These are double keel designs with conic wings and a multiple attachment bridle which can be used with either dual line or quad line controls. They have excellent pull, but suffer from a smaller window than more modern traction designs. Normally the #5 and #9 alternatives are used. Early Rogallo Patents
See alsoExternal links
Text from Wikipedia is available under the Creative Commons Attribution/Share-Alike License; additional terms may apply.
Published in July 2009. Click here to read more articles related to aviation and space!
|

 |
|
Copyright 2004-2026 © by Airports-Worldwide.com, Vyshenskoho st. 36, Lviv 79010, Ukraine Legal Disclaimer |