|
 |
|
||||
|
By
Wikipedia,
An autogyro is a type of rotorcraft invented by Juan de la Cierva in 1919, making its first successful flight on 9 January 1923, at Cuatro Vientos Airfield in Madrid. Similar to helicopters, autogyros use a rotor to develop lift. While a helicopter's rotor is rotated by an engine during normal flight, the rotor of an autogyro is driven by aerodynamic forces in autorotation. An engine-powered propeller, similar to that of a fixed-wing aircraft, provides thrust for the autogyro. Autogyros are also known as gyroplanes, gyrocopters, or rotaplanes. The term Autogiro was a trademark of the Cierva Autogiro Company and the term Gyrocopter was originally a trademark of Bensen Aircraft. ConfigurationAn autogyro is characterised by a free-spinning rotor that turns due to passage of air upwards through the rotor. The vertical component of the total aerodynamic reaction of the rotor gives lift for the vehicle, and sustains the autogyro in the air. A separate propeller provides forward thrust, and can be placed in a tractor configuration, with the engine and propeller at the front of the fuselage (e.g., Cierva), or pusher configuration with the engine and propeller at the rear of the fuselage (e.g., Bensen). Whereas a helicopter works by forcing the rotor blades through the air, pushing air downwards, the autogyro rotor blade generates lift in the same way as a glider's wing by changing the angle of the air as it moves upwards and backwards relative to the rotor blade. The free-spinning blades turn by autorotation; the rotor blades are angled so that they not only give lift, but the angle of the blades causes the lift to accelerate the blades' rotation rate, until the rotor turns at a stable speed with the drag and thrust forces in balance. Pitch control of the autogyro is by tilting the rotor fore and aft; roll control is by tilting the rotor laterally (side to side). Three designs to affect the tilt of the rotor are a tilting hub (Cierva), swashplate (Air & Space 18A), or servo-flaps (Kaman SAVER). A rudder provides yaw control. On pusher configuration autogyros, the rudder is typically placed in the propeller slipstream to maximize yaw control at low airspeed (but not always, as seen in the McCulloch J-2, with twin rudders placed outboard of the propeller arc). Flight controlsThere are three primary flight controls: control stick, rudder pedals, and throttle. The control stick is termed cyclic and tilts the rotor in the desired direction to provide pitch and roll control. The rudder pedals provide yaw control, and the throttle controls engine power. Secondary flight controls include the rotor transmission clutch, also known as a pre-rotator, which when engaged drives the rotor to start it spinning before takeoff, and collective pitch to reduce blade pitch before driving the rotor. Collective pitch controls are not usually fitted to autogyros, but can be found on the Air & Space 18A and McCulloch J-2 and are capable of near VTOL performance. Unlike a helicopter, autogyros without collective pitch need a runway to takeoff; however they are capable of landing with a very short, or zero ground roll. Pusher vs tractor configuration
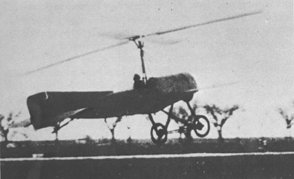
Modern autogyros typically follow one of two basic configurations. The most common design is the pusher configuration, where the engine and propeller are located behind the pilot and rotor mast, such as in the Bensen "Gyrocopter". It was developed by Igor Bensen in the decades following World War II, and came into widespread use shortly afterward. Less common today is the tractor configuration. In this version the engine and propeller are located at the front of the aircraft, ahead of the pilot and rotor mast. This was the primary configuration in early autogyros, but became less common after the advent of the helicopter. It has enjoyed a revival since the mid 1970s however, in the "Little Wing" autogyro concept. HistoryJuan de la Cierva was a Spanish engineer and aeronautical enthusiast. In 1921, he participated in a design competition to develop a bomber for the Spanish military. De la Cierva designed a three-engined aircraft, but during an early test flight, the bomber stalled and crashed. De la Cierva was troubled by the stall phenomenon and vowed to develop an aircraft that could fly safely at low airspeeds. The result was the first successful rotorcraft, which he named Autogiro in 1923. De la Cierva's autogyro used an airplane fuselage with a forward-mounted propeller and engine, a rotor mounted on a mast, and a horizontal and vertical stabilizer. Early development
De la Cierva's first three designs (C.1, C.2, and C.3) were unstable due to aerodynamic and structural deficiencies in their rotors. His fourth design, the C.4, made the first successful flight of an autogyro on 9 January 1923, piloted by Alejandro Gomez Spencer at Cuatro Vientos airfield in Madrid, Spain. De la Cierva had fitted the rotor of the C.4 with flapping hinges to attach each rotor blade to the hub. The flapping hinges allowed each rotor blade to flap, or move up and down, to compensate for dissymmetry of lift, the difference in lift produced between the right and left sides of the rotor as the autogyro moves forward. Three days later, the engine failed shortly after takeoff and the aircraft descended slowly and steeply to a safe landing, validating De la Cierva's efforts to produce an aircraft that could be flown safely at low airspeeds. De la Cierva developed his C.6 model with the assistance of Spain's Military Aviation establishment, having expended all his funds on development and construction of the first five prototypes. The C.6 first flew in February 1925, including a flight of 10.5 km (7 miles) from Cuatro Vientos airfield to Getafe airfield in about 8 minutes, a significant accomplishment for any rotorcraft of the time. Shortly after De la Cierva's success with the C.6, Cierva accepted an offer from Scottish industrialist James G. Weir to establish the Cierva Autogiro Company in England, following a demonstration of the C.6 before the British Air Ministry at RAE Farnborough, on 20 October 1925. Britain had become the world centre of autogyro development. A crash in February 1927, due to blade root failure, led to an improvement in rotor hub design. A drag hinge was added in conjunction with the flapping hinge to allow each blade to move fore and aft and relieve in-plane stresses, generated as a byproduct of the flapping motion. This development led to the Cierva C.8, which, on 18 September 1928, made the first rotorcraft crossing of the English Channel followed by a tour of Europe. The U.S. industrialist Harold Frederick Pitcairn, upon learning of the successful flights of the autogyro, had previously visited De la Cierva in Spain. In 1928 he visited him again, in England, after taking a C.8 L.IV test flight piloted by Arthur H.C.A. Rawson. Being particularly impressed with the autogyro's safe vertical descent capability, Pitcairn purchased a C.8 L.IV with a Wright Whirlwind engine. Arriving in the United States on 11 December 1928 accompanied by Rawson, this autogyro was redesignated C.8W. Subsequently, production of autogyros was licensed to a number of manufacturers, including the Pitcairn Autogiro Company in the U.S. and Focke-Wulf of Germany. Development of the autogyro continued in search for a means to accelerate the rotor prior to takeoff (called prerotating). Rotor drives initially took the form of a rope wrapped around the rotor axle and then pulled by a team of men to accelerate the rotor - this was followed by a long taxi to bring the rotor up to speed sufficient for takeoff. The next innovation was flaps on the tail to redirect the propeller slipstream into the rotor while on the ground. This design was first tested on a C.19 in 1929. Efforts in 1930 had shown that development of a light and efficient mechanical transmission was not a trivial undertaking, but the Pitcairn-Cierva Autogiro Company, of Willow Grove, Pennsylvania, finally solved the problem with a transmission driven by the engine in 1932. De la Cierva's early autogyros were fitted with fixed rotor hubs, small fixed wings, and control surfaces like those of a fixed wing aircraft. At low airspeeds, the control surfaces became ineffective and could readily lead to loss of control, particularly during landing. In response, Cierva developed a direct control rotor hub, which could be tilted in any direction by the pilot. De la Cierva's direct control was first developed on the Cierva C.19 Mk. V and saw production on the Cierva C.30 series of 1934. When improvements in helicopters made them practical, autogyros became largely neglected. They were, however, used in the 1930s by major newspapers, and by the US Postal Service for mail service between the Camden, NJ airport (USA) and the top of the post office building in downtown Philadelphia, Pennsylvania (USA). World War IIIn World War II, Germany pioneered a very small gyroglider rotor kite, the Focke-Achgelis Fa 330 "Bachstelze" (Water-wagtail), towed by U-boats to provide aerial surveillance. The Japanese Army developed the Kayaba Ka-1 Autogyro for reconnaissance, artillery-spotting, and anti-submarine uses. The Ka-1 was based on an American design first imported to Japan in 1938. The craft was initially developed for use as an observation platform and for artillery spotting duties. The Army liked the craft's short take-off span, and especially its low maintenance requirements. In 1941 production began, with the machines assigned to artillery units for spotting the fall of shells. These carried two crewmen: a pilot and a spotter. Later, the Japanese Army commissioned two small aircraft carriers intended for coastal antisubmarine (ASW) duties. The spotter's position on the Ka-1 was modified in order to carry one small depth charge. Ka-1 ASW autogyros operated from shore bases as well as the two small carriers. They appear to have been responsible for at least one submarine sinking. The autogyro was used to calibrate the coastal radar stations during and after the Battle of Britain. Postwar developmentsThe autogyro was resurrected after World War II when Dr. Igor Bensen, a Russian immigrant, saw a captured German U-Boat's Fa 330 gyroglider and was fascinated by its characteristics. At work he was tasked with the analysis of the British "Rotachute" gyro glider designed by expatriate Austrian Raoul Hafner. This led him to adapt the design for his own purposes and eventually market the B-7. Bensen submitted an improved version, the Bensen B-8M, for testing to the United States Air Force, which designated it the X-25. The B-8M was designed to use surplus McCulloch engines used on flying unmanned target drones. Ken Wallis developed a miniature autogyro craft, the Wallis autogyro, in England in the 1960s, and autogyros built similar to Wallis' design appeared for a number of years. Ken Wallis' designs have been used in various scenarios including military training, police reconnaissance, and in another case a search for the Loch Ness Monster. Three different autogyro designs have been certified by the FAA for commercial production: the Umbaugh U-18/Air & Space 18A of 1965, the Avian 2-180 of 1967, and the McCulloch J-2 of 1972. All have been commercial failures, for various reasons. Bensen GyrocopterThe basic Bensen Gyrocopter design is a simple frame of square aluminium or galvanized steel tubing, reinforced with triangles of lighter tubing. It is arranged so that the stress falls on the tubes, or special fittings, not the bolts. A front-to-back keel mounts a steerable nosewheel, seat, engine, and a vertical stabilizer. Outlying mainwheels are mounted on an axle. Some versions may mount seaplane-style floats for water operations.
Bensen-type autogyros use a pusher configuration for simplicity and to increase visibility for the pilot. Power can be supplied by a variety of engines. McCulloch drone engines, Rotax marine engines, Subaru automobile engines, and other designs have been used in Bensen-type designs. The rotor is mounted atop the vertical mast. The rotor system of all Bensen-type autogyros is of a two-blade teetering design. There are some disadvantages associated with this rotor design, but the simplicity of the rotor design lends itself to ease of assembly and maintenance and is one of the reasons for its popularity. Aircraft-quality birch was specified in early Bensen designs, and a wood/steel composite is used in the world speed record holding Wallis design. Gyroplane rotor blades are made from other materials such as aluminium and GRP-based composite blades. Due to Bensen's pioneering of the concept and the popularity of his design, "Gyrocopter" has become a genericized trademark for pusher configuration autogyros. Certification by national aviation authoritiesUS certificationA certificated autogyro must meet mandated stability and control criteria; in the United States these are set forth in Federal Aviation Regulations Part 27: Airworthiness Standards: Normal Category Rotorcraft. The U.S. Federal Aviation Administration issues a Standard Airworthiness Certificate to qualified autogyros. Amateur-built or kit-built aircraft are operated under a Special Airworthiness Certificate in the Experimental category. Per FAR 1.1, the FAA uses the term "gyroplane" for all autogyros, regardless of the type of Airworthiness Certificate. UK certification
Some autogyros, such as the Rotorsport MT03, have type approval by the United Kingdom Civil Aviation Authority (CAA) under British Civil Airworthiness Requirements CAP643 Section T. Others operate under a permit to fly issued by the Popular Flying Association – similar to the US experimental aircraft certification. However, the CAA's assertion that autogyros have a poor safety record means that permit to fly will only be granted to existing types of autogyro. All new types of autogyro must be submitted for full type approval under CAP643 Section T. In 2005, the CAA issued a mandatory permit directive (MPD) which restricted operations for single seat autogryos, and were subsequently integrated into CAP643 Issue 3 published on 12 August 2005. The restrictions are concerned with the offset between the centre of gravity and thrust line, and apply to all aircraft unless evidence is presented to the CAA that the CG/Thrust Line offset less than 2 inches (5 cm) in either direction. The restrictions are summarised as follows:
World recordsIn 1931, Amelia Earhart flew a Pitcairn PCA-2 to a women's world altitude record of 18,415 ft (5,613 m). Wing Commander Ken Wallis has held most of the autogyro world records during his autogyro flying career. These include the speed record of 186 km/h (111.7 mph), and the straight-line distance record of 869.23 km (543.27 miles). On 16 November 2002, Wallis increased the speed record to 207.7 km/h (129.1 mph) – and simultaneously set another world record as the oldest pilot to set a world record. The autogyro is one of the last remaining types of aircraft which has not yet been used to circumnavigate the globe. Expedition Global Eagle was the first attempt in history to circumnavigate the globe using an autogyro. The expedition set the record for the longest flight over water by an autogyro during the segment from Muscat, Oman to Karachi. The attempt was finally abandoned due to bad weather after a trip totalling 7,500 miles (12,100 km). In February 2003, a year before the circumnavigation attempt, the Global Eagle piloted by Warrant Officer Barry Jones also broke the world range record by flying non-stop from Culdrose in Cornwall to Wick in Scotland, a total of 580 miles (928 km) breaking the old record held by Wing Commander Ken Wallis. Andrew Keech made a transcontinental flight from Kitty Hawk, North Carolina to San Diego, California in October 2003 and set 3 world records for speed over a recognized course. The 3 records were verified by tower personnel or by official observers of the United States' National Aeronautic Association (NAA). On 9 February 2006, he broke two of his world records and set a record for distance, ratified by the Fédération Aéronautique Internationale (FAI); Speed over a closed circuit of 500 km (311 mi) without payload: 168.29 km/h (104.57 mph), speed over a closed circuit of 1,000 km (621 mi) without payload: 165.07 km/h (102.57 mph), and distance over a closed circuit without landing: 1,019.09 km (633.23 mi). Autogyros in popular cultureAn indication of the pre-war popularity of the autogyro, its subsequent decline and later rise of interest can be inferred from its appearances in the films and comics of the day. Notable appearances include:
See also
External links
Text from Wikipedia is available under the Creative Commons Attribution/Share-Alike License; additional terms may apply.
Published in July 2009. Click here to read more articles related to aviation and space!
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 |
|
Copyright 2004-2026 © by Airports-Worldwide.com, Vyshenskoho st. 36, Lviv 79010, Ukraine Legal Disclaimer |