|
 |
|
||||
|
By
Wikipedia,
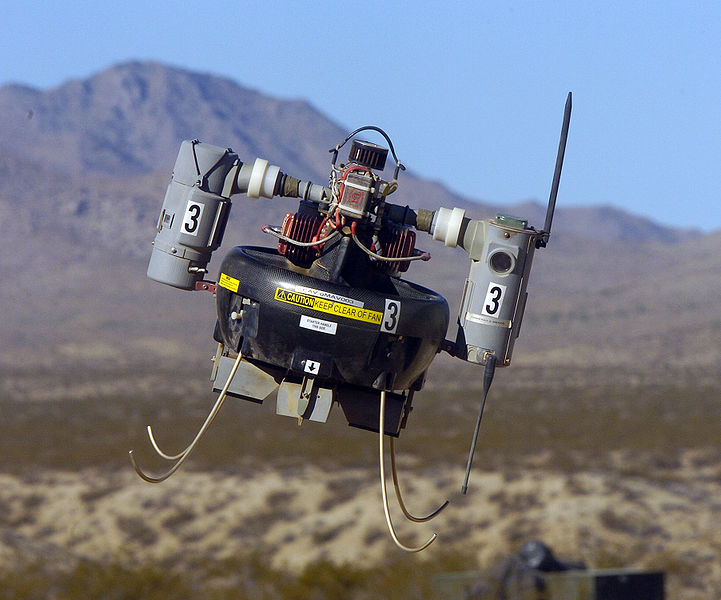
The term micro air vehicle (MAV) or micro aerial vehicle refers to a new type of remotely controlled aircraft (UAV) that is significantly smaller than similar craft obtainable using state of the art technology as it was in as of 2007. The target dimension for MAVs today is approximately 15 centimetres (six inches) and development of insect-size aircraft is reportedly expected in the near future. Potential military use is one of the driving factors, although MAVs are also being used commercially and in scientific, police and mapping applications. Another promising area is remote observation of hazardous environments which are inaccessible to ground vehicles. Because these aircraft are often in the same size range as radio-controlled models, they are increasingly within the reach of amateurs, who are making their own MAVs for aerial robotics contests and aerial photography. ConfigurationsThree types of MAVs are under investigation: airplane-like fixed wing models, bird- or insect- like ornithopter (flapping wing) models, and helicopter-like rotary wing models. Each type has different advantages and disadvantages, different scenarios may call for different types of MAV. Fixed-wing MAVs can currently achieve higher efficiency and longer flight times, so are well suited to tasks that require extended loitering times, but are generally unable to enter buildings, as they cannot hover or make the tight turns required. Rotary-wings allow hovering and movement in any direction, at the cost of shorter flight time. Flapping wings offer the most potential for miniaturization and maneuvrability, but are currently far inferior to fixed and rotary wing MAVs. Aerodynamics/aeroelastic aspectThe range of Reynolds number at which they fly is similar to that of an insect or bird (10 - 10). Thus some researchers think that understanding bird flight or insect flight will be useful in designing MAVs. Bio-inspirationA new trend in the MAV community is to take inspiration from flying insects or birds to achieve unprecedented flight capabilities. Biological systems are not only interesting for their smart way of relying on unsteady aerodynamics using flapping wings, they are increasingly inspiring engineers for other aspects such as; distributed sensing and acting, sensor fusion and information processing. A first symposium bringing together biologists and aerial roboticists has been held in 2007and some books have recently been published on this topic. Practical implementationsThe TU Delft University in the Netherlands has developed the (in 2008) smallest ornithopter fitted with a camera, the Delfly Micro, the third version of the Delfly project that started in 2005. (See Delfly.nl for photographs.) This version measures 10 cm and weighs 3 grammes, slightly larger (and noisier) than the Dragonfly it was modeled after. The importance of the camera lies in remote control when it is out of sight and eventually completely autonomous flight. This version has, however, not yet been successfully tested outside, although it performs well indoors. Its predecessor, the Delfly II, could fly outside, but was three times the size of this craft. The Delfly II could also hang still in the air and take off and land vertically. Researcher David Lentink of Wageningen University, who participated in all three models, says it would take at least half a century to mimick the capabilities of insects, with their low energy consumption and multitude of sensors; not only eyes, but also gyroscopes, windsensors and much more. He says fly-size ornithopters should be possible, provided the tail is well designed. Rick Ruijsink of TU Delft says the biggest problem is the weight of the battery. In the Delfly Micro, the lithium-ion battery constitutes a third of the weight, at 1 gramme. Luckily, developments in this area are still going very fast, due to demand in various other (more commercial) fields. Ruijsink says the purpose of these crafts is on the one hand to learn to understand how insects fly, and on the other to provide more practical uses, such as flying through cracks in concrete to search for earthquake victims and exploring a radioactivity-contaminated building. Spy agencies and the military also see potential for such small vehicles as spies and scouts. Robert Wood at Harvard University developed an even smaller ornithopter, at just 3 cm, but this craft is not autonomous in that it gets its power through a wire and is led along a rail. In early 2008 the United States company Honeywell received FAA approval to operate its MAV, designated as gMAV in the national airspace system on an experimental basis. The gMAV is the fourth MAV to receive such approval. The Honeywell gMAV uses ducted thrust for lift, allowing it to takeoff and land vertically and to hover. It is also capable of "high-speed" forward flight, according to the company, but no performance figures have been released. However, the company states that the machine is light enough to be carried by a man. It was originally developed as part of a DARPA program, and its initial application is expected to be with the police department of Miami-Dade County, Florida. Although there are currently no true MAVs (i.e., truly micro scaled flyers), DARPA has attempted a program to develop even smaller Nano Air Vehicles (NAVs) with a wingspan of 7.5 centimetres (three inches), however no NAVs meeting DARPA's original program specification were forthcoming. Beyond the difficulties in developing MAVs, the issue of their control has yet to be adequately addressed by most designs. Due to their small size, a teleoperated MAV is impractical because it is too small to be observed by a ground station pilot once it has gone beyond about 100 meters unless an onboard camera is provided through which the ground pilot can attempt to stabilize and navigate the craft. This was first demonstrated in the Aerovironment Black Widow. A truly "micro" air vehicle suffers from the inability to carry an onboard transmitter powerful enough to allow for teleoperation. For this reason, some researchers have focused on fully autonomous MAV flight. One such device, which has been designed from its inception as a fully autonomous MAV, is the Entomopter originally developed at the Georgia Institute of Technology under a DARPA contract by Robert C. Michelson. Given that MAVs can be controlled by autonomous means, significant test and evaluation issues continue to exist. The Washington Post has referred to insect-like versions of MAVs as Robobugs. See also
External linksResearch Projects
Miscellaneous Projects
Commercially Available Vehicles
Text from Wikipedia is available under the Creative Commons Attribution/Share-Alike License; additional terms may apply.
Published in July 2009. Click here to read more articles related to aviation and space!
|

 |
|
Copyright 2004-2026 © by Airports-Worldwide.com, Vyshenskoho st. 36, Lviv 79010, Ukraine Legal Disclaimer |