|
 |
|
||||
|
By
Wikipedia, The Mars Science Laboratory (MSL), known as Curiosity, is a NASA rover scheduled to be launched between October and December 2011 and perform the first-ever precision landing on Mars. The MSL rover will be over five times as heavy and carry over ten times the weight in scientific instruments as one of the Mars Exploration Rovers. It will carry more advanced scientific instruments than any other mission to Mars to date, including instruments for the analysis of samples scooped up from the soil and drilled powders from rocks. It will also investigate the past or present ability of Mars to support microbial life. The United States, Canada, Germany, France, Russia and Spain will provide the instruments onboard. The MSL rover will be launched by an Atlas V 541 rocket and will be expected to operate for at least 1 martian year (668 Martian sols/686 Earth days) as it explores with greater range than any previous Mars rover. The New York Times has reported that the total cost of the MSL is about $2.3 billion USD. Goals and objectivesThe MSL has four goals: To determine if life ever arose on Mars, to characterize the climate of Mars, to characterize the geology of Mars, and to prepare for human exploration. To contribute to the four science goals and meet its specific goal of determining Mars' habitability, Mars Science Laboratory has eight scientific objectives:
History
In September 2006, MSL was approved by NASA for a 2009 launch. In April 2008, it was reported that the project is $235 million USD, or 24% over budget. The money to compensate this overrun should come from other NASA Mars missions that will need to be cut. In August 2008, it was announced that the third MSL workshop would be held to summarize the data on the 7 potential landing sites. The result of the voting for the third MSL workshop is that the top three candidate sites in order of votes are: the Eberswalde Crater, the Holden Crater, and the Gale Crater. In October 2008, MSL is getting closer to a 30% cost overrun and without additional funding may be cancelled if additional funds are not granted by the United States Congress. Doug McCuistion, director of the Mars Exploration Program at NASA has said that the rover's progress will be assessed again in January, but that he "fully believe that Congress will support [MSL] as we go forward on this because they recognize the importance of the mission as well." On November 18, 2008, a contest began for U.S. school students 5 to 18 years old to name the MSL rover. On November 19, 2008, NASA announced that MSL project leaders at JPL had reduced the list of candidate landing sites to four: Eberswalde, Gale, Holden, Mawrth. On December 3, 2008, NASA announced that the MSL launch will be delayed until the fall of 2011 as a result of the current progress in building the hardware and testing it. Although the delay will increase the overall cost of the mission it was decided that for testing purposes the schedule for the October 2009 launch was not feasible. On March 23-29, 2009, the general public had an opportunity to rank nine finalist names through a public poll on the NASA website as additional input for judges to consider during the MSL name selection process. On May 27, 2009, the winning name of Curiosity, which was submitted by 6th grader Clara Ma, was announced in the MSL naming contest. SpecificationsLength/weightThe MSL will have a length of 9 feet (2.7 m) and weigh 1,984 pounds (900 kg) including 176 pounds (80 kg) of scientific instruments. It will be the same size as a Mini Cooper automobile. This compares to the Mars Exploration Rovers which have a length of 5 feet 2 inches (1.6 m) and weigh 384 pounds (174 kg) including 15 pounds (6.8 kg) of scientific instruments. SpeedOnce on the surface, the MSL rover will be able to roll over obstacles approaching 75 centimeters (30 in) in height. Maximum terrain-traverse speed is estimated to be 90 meters (300 ft) per hour via automatic navigation, however, average traverse speeds will likely be about 30 meters (98 ft) per hour, based on variables including power levels, difficulty of the terrain, slippage, and visibility. MSL is expected to traverse a minimum of 12 miles (19 km) in its two-year mission. Power sourceThe MSL will be powered by radioisotope thermoelectric generators (RTGs), as used by the successful Mars landers Viking 1 and Viking 2 in 1976. Solar power is not an efficient power source for Mars surface operations because solar power systems cannot operate effectively at high Martian latitudes, in shaded areas, nor in dusty conditions. Furthermore, solar power cannot provide power at night, thus limiting the ability of the rover to keep its systems warm, reducing the life expectancy of electronics. RTGs can provide reliable, continuous power day and night, and waste heat can be used via pipes to warm systems, freeing electrical power for the operation of the vehicle and instruments. The MSL power source will use the latest RTG generation built by Boeing and is called the "Multi-Mission Radioisotope Thermoelectric Generator" (MMRTG). The MMRTG is a flexible and compact power system under development that is based on conventional RTGs. The MMRTG is designed to produce 125 watts of electrical power at the start of the mission and 100 watts after 14 years. The MSL will generate 2.5 kilowatt hours per day compared to the Mars Exploration Rovers which can generate about 0.6 kilowatt hours per day. Although the mission is programmed to last about 2 years, the MMRTG will have a minimum lifetime of 14 years. Heat Rejection SystemThe Heat Rejection System (HRS) uses fluid pumped through 200 feet of tubes in the MSL body so that sensitive components are kept at certain temperatures. The temperature in the area that MSL might land at can vary from +86°F to −197°F (+30 to −127°C). There are three methods of heating components with the first being that certain components will generate heat, heaters will be put next to certain components, and the HRS can gather excess heat from the MMRTG. The HRS can also cool components if necessary. ComputersThe two identical on-board rover computers are called "Rover Electronics Module" (REM) and they contain radiation hardened memory to tolerate the extreme radiation environment from space and to safeguard against power-off cycles. Each computer's memory includes 256 kB of EEPROM, 256 MB of DRAM, and 2 GB of flash memory. This compares to 3 MB of EEPROM, 128 MB of DRAM, and 256 MB of flash memory used in the Mars Exploration Rovers. The REM computers use the RAD750 CPU which is a successor to the RAD6000 CPU used in the Mars Exploration Rovers. The RAD750 CPU is capable of 300 MIPS while the RAD6000 CPU is capable of 35 MIPS. The rover carries an Inertial Measurement Unit (IMU) that provides 3-axis information on its position; the device is used in rover navigation to support safe traverses and to estimate the degree of tilt. The rover's computers will constantly self-monitor its systems, communications and thermal stability at all times. Activities such as taking pictures, driving, and operating the instruments will be performed under commands transmitted in a command sequence to the rover from the flight team. In case of problems, the backup computer can be turned on to take over control and continue the mission. Proposed scientific payloadAt present, 10 instruments have been selected for development or production for the Mars Science Laboratory rover: Cameras (MastCam, MAHLI, MARDI)The MastCam, MAHLI, and MARDI cameras are being developed by Malin Space Science Systems and they all share common design components, such as on-board electronic imaging processing boxes, 1600x1200 CCDs, and a RGB Bayer pattern filter.
ChemCamChemCam is a suite of remote sensing instruments, including the first laser-induced breakdown spectroscopy (LIBS) system to be used for planetary science and a remote micro-imager (RMI). The LIBS instrument can target a rock or soil sample from up to 7 meters away, vaporizing a small amount of it and then collecting a spectrum of the light emitted by the vaporized rock. An infrared laser with 1067 nm wavelength and a 5 nanosecond pulse will focus on a sub-millimeter spot with a power in excess of 10 megaWatts, depositing 15mJ of energy. Detection of the ball of luminous plasma will be done in the visible and near-UV and near-IR range, between 240 nm and 800 nm. Using the same collection optics, the RMI provides context images of the LIBS analysis spots. The RMI resolves 1 mm objects at 10 m distance, and has a field of view covering 20 cm at that distance. The ChemCam instrument suite is being developed by the Los Alamos National Laboratory and the French CESR laboratory.NASA's cost for ChemCam is approximately $10M, including an overrun of about $1.5M , a very tiny fraction of the total mission costs.The flight model of the Mast Unit was delivered from the French CNES to Los Alamos National Laboratory and was able to deliver the engineering model to JPL in February 2008. Alpha-particle X-ray spectrometer (APXS)This device will irradiate samples with alpha particles and map the spectra of X-rays that are reemitted for determining the elemental composition of samples. It is being developed by the Canadian Space Agency. The APXS is a form of PIXE, which has previously been used by the Mars Pathfinder and the Mars Exploration Rovers. CheMinChemin stands for "Chemistry & Mineralogy X-Ray Diffraction/X-Ray Fluorescence Instrument". CheMin is a X-ray diffraction/X-ray fluorescence instrument that will quantify minerals and mineral structure of samples. It is being developed by Dr. David Blake at NASA Ames Research Center and the NASA's Jet Propulsion Laboratory. Sample Analysis at Mars (SAM)The SAM instrument suite will analyze organics and gases from both atmospheric and solid samples. It is being developed by the NASA Goddard Space Flight Center, the Laboratoire Inter-Universitaire des Systèmes Atmosphériques (LISA) of France's CNRS and Honeybee Robotics, along with many additional external partners. The SAM suite consists of three instruments:
The Quadrupole Mass Spectrometer (QMS) will detect gases sampled from the atmosphere or those released from solid samples by heating. The Gas Chromatograph (GC) will be used to separate out individual gases from a complex mixture into molecular components with a mass range of 2–235 u. The Tunable Laser Spectrometer (TLS) will perform precision measurements of oxygen and carbon isotope ratios in carbon dioxide (CO2) and methane (CH4) in the atmosphere of Mars in order to distinguish between a geochemical and a biological origin. The SAM also has three subsystems: The Chemical Separation and Processing Laboratory (CSPL), for enrichment and derivatization of the organic molecules of the sample; the Sample Manipulation System (SMS) for transporting powder delivered from the MSL drill to a SAM inlet and into one of 74 sample cups. The SMS then moves the sample to the SAM oven to release gases by heating to up to 1000 C; and the Wide Range Pumps (WRP) subsystem to purge the QMS, TLS, and the CPSL. Radiation Assessment Detector (RAD)This instrument will characterize the broad spectrum of radiation found near the surface of Mars for purposes of determining the viability and shielding needs for human explorers. Funded by the Exploration Systems Mission Directorate at NASA Headquarters and developed by Southwest Research Institute (SwRI) and the extraterrestrial physics group at Christian-Albrechts-Universität zu Kiel, Germany. Dynamic Albedo of Neutrons (DAN)A pulsed neutron source and detector for measuring hydrogen or ice and water at or near the martian surface, provided by the Russian Federal Space Agency. Rover Environmental Monitoring Station (REMS)Meteorological package and an ultraviolet sensor provided by the Spanish Ministry of Education and Science. It will be mounted on the camera mast and measure atmospheric pressure, humidity, wind currents and direction, air and ground temperature and ultraviolet radiation levels. MSL Entry Descent and Landing Instrumentation (MEDLI)The MEDLI project’s main objective is to measure aerothermal environments, sub-surface heat shield material response, vehicle orientation, and atmospheric density for the atmospheric entry through the sensible atmosphere down to heat shield separation of the Mars Science Laboratory entry vehicle. The MEDLI instrumentation suite will be installed in the heatshield of the MSL entry vehicle. The acquired data will support future Mars missions by providing measured atmospheric data to validate Mars atmosphere models and clarify the design margins on future Mars missions. MEDLI instrumentation consists of three main subsystems: MEDLI Integrated Sensor Plugs (MISP), Mars Entry Atmospheric Data System (MEADS) and the Sensor Support Electronics (SSE). Hazard Avoidance Cameras (Hazcams)The MSL will use four pairs of black and white navigation cameras located on the front left and right and rear left and right of the rover. The Hazard Avoidance Cameras (also called Hazcams) are used for autonomous hazard avoidance during rover drives and for safe positioning of the robotic arm on rocks and soils. The cameras will use visible light to capture three-dimensional (3-D) imagery. The cameras have a 120 degree field of view and map the terrain at up to 10 feet (3 meters) in front of the rover. This imagery safeguards against the rover inadvertently crashing into unexpected obstacles, and works in tandem with software that allows the rover to make its own safety choices. Navigation Cameras (Navcams)The MSL will use two pairs of black and white navigation cameras mounted on the mast to support ground navigation. The cameras will use visible light to capture three-dimensional (3-D) imagery. The cameras have a 45 degree field of view. Launch vehicleThe MSL will be launched using an Atlas V rocket which is a two stage rocket that has been used to launch the Mars Reconnaissance Orbiter and New Horizons. Specifically the MSL will be launched using the Atlas V 541 which is capable of launching 17,597 pounds (8,672 kg) to geostationary transfer orbit. The launch phase of the mission will begin when the MSL spacecraft transfers to internal power on the launch pad and it will end when the MSL spacecraft separates from the launch vehicle. Landing system
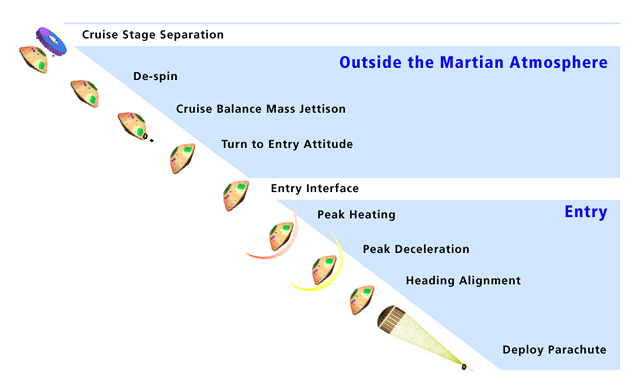
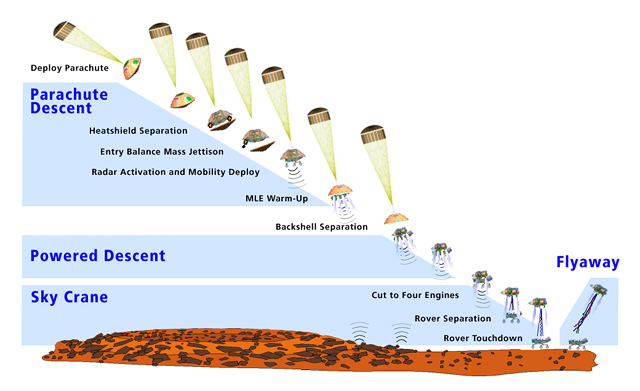
Landing a large mass on Mars is a difficult challenge: the atmosphere is thick enough to prevent rockets being used to provide significant deceleration, but too thin for parachutes and aerobraking alone to be effective. Although some previous missions have used airbags to cushion the shock of landing, the MSL is too large for this to be an option. The MSL descent will have have to employ a combination of several systems in a precise order, where the entry, descent and landing sequence will break down into four parts:
Proposed landing sitesThe essential issue when selecting an optimum landing site, is to identify a particular geologic environment, or set of environments, that would support microbial life. To mitigate the risk of disappointment and ensure the greatest chance for science success, interest is placed at the greatest number of possible science objectives at a chosen landing site. Thus, a landing site with morphologic and mineralogic evidence for past water, is better than a site with just one of these criteria. Furthermore, a site with spectra indicating multiple hydrated minerals is preferred; clay minerals and sulfate salts would constitute a rich site. Hematite, other iron oxides, sulfate minerals, silicate minerals, silica, and possibly chloride minerals have all been suggested as possible substrates for fossil preservation. Indeed, all are known to facilitate the preservation of fossil morphologies and molecules on Earth. Difficult terrain is the best candidate for finding evidence of livable conditions, and engineers must be sure the rover can safely reach the site and drive within it. The current engineering constraints call for a landing site less than 45° from the Martian equator, and less than 1 km above the reference datum. At the first MSL Landing Site workshop, 33 potential landing sites were identified. By the second workshop in late 2007, the list had grown to include almost 50 sites, and by the end of the workshop, the list was reduced to six;in November 2008, project leaders at a third workshop reduced the list to four landing sites. A fourth workshop is planned for late 2009 and a fifth workshop is planned for late 2010.
See also
http://www.nasa.gov/mission_pages/mars/missions/marssciencelab-index.html M. K. Lockwood (2006). "Introduction: Mars Science Laboratory: The Next Generation of Mars Landers And The Following 13 articles " (PDF). Journal of Spacecraft and Rockets 43 (2): 257–257. doi:. http://pdf.aiaa.org/jaPreview/JSR/2006/PVJA20678.pdf. External links
Text from Wikipedia is available under the Creative Commons Attribution/Share-Alike License; additional terms may apply.
Published in July 2009. Click here to read more articles related to aviation and space!
|

 |
|
Copyright 2004-2026 © by Airports-Worldwide.com, Vyshenskoho st. 36, Lviv 79010, Ukraine Legal Disclaimer |