|
 |
|
||||
|
By
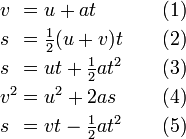
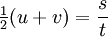
Wikipedia, In physics, equations of motion are equations that describe the behavior of a system (e.g., the motion of a particle under an influence of a force) as a function of time. Sometimes the term refers to the differential equations that the system satisfies (e.g., Newton's second law or Euler–Lagrange equations), and sometimes to the solutions to those equations. The equations that apply to bodies moving linearly (that is, one dimension) with uniform acceleration are presented below. They are often referred to as "UVAST", "SUVAT", "VUSAT", "VUATS" or "UVATS" equations, as the 5 variables they involve are often represented by those letters (s = displacement, u = initial velocity, v = final velocity, a = acceleration, t = time). Equations of uniformly accelerated linear motionThe body is considered between two instants in time: one "initial" point and one "current". Often, problems in kinematics deal with more than two instants, and several applications of the equations are required. If a is constant, a differential, a dt, may be integrated over an interval from 0 to Δt (Δt = t − ti), to obtain a linear relationship for velocity. Integration of the velocity yields a quadratic relationship for position at the end of the interval. Note that each of the equations contains four of the five variables. Thus, in this situation it is sufficient to know three out of the five variables to calculate the remaining two. Classic versionThe above equations are often written in the following form: By substituting (1) into (2), we can get (3), (4) and (5) where
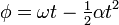
ExamplesMany examples in kinematics involve projectiles, for example a ball thrown upwards into the air. Given initial speed u, one can calculate how high the ball will travel before it begins to fall. The acceleration is local acceleration of gravity g. At this point one must remember that while these quantities appear to be scalars, the direction of displacement, speed and acceleration is important. They could in fact be considered as uni-directional vectors. Choosing s to measure up from the ground, the acceleration a must be in fact −g, since the force of gravity acts downwards and therefore also the acceleration on the ball due to it. At the highest point, the ball will be at rest: therefore v = 0. Using the 4th equation, we have: Substituting and cancelling minus signs gives: ExtensionMore complex versions of these equations can include a quantity Δs for the variation on displacement (s − s0), s0 for the initial position of the body, and v0 for u for consistency. However a suitable choice of origin for the one-dimensional axis on which the body moves makes these more complex versions unnecessary. Equations of circular motionThe analogues of the above equations can be written for rotation: where:
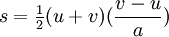
DerivationMotion equation 1By definition of acceleration, Hence Motion equation 2By definition, Hence Motion equation 3Using Motion Equation 2, replace t with above Motion equation 4Using Motion Equation 1 to replace u in Motion Equation 3 gives See also
External links
Text from Wikipedia is available under the Creative Commons Attribution/Share-Alike License; additional terms may apply.
Published in July 2009. Click here to read more articles related to aviation and space!
|

 |
|
Copyright 2004-2024 © by Airports-Worldwide.com, Vyshenskoho st. 36, Lviv 79010, Ukraine Legal Disclaimer |