 |
 |
|
||||
|
By
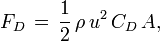
Wikipedia, In fluid dynamics, the drag equation is a practical formula used to calculate the force of drag experienced by an object due to movement through a fully-enclosing fluid. The equation is attributed to Lord Rayleigh, who originally used L in place of A (with L being some linear dimension). The force on a moving object due to a fluid is: where
The reference area A is typically defined as the area of the orthographic projection of the object on a plane perpendicular to the direction of motion. For non-hollow objects with simple shape, such as a sphere, this is exactly the same as a cross sectional area. For other objects (for instance, a rolling tube or the body of a cyclist), A may be significantly larger than the area of any cross section along any plane perpendicular to the direction of motion. Airfoils use the square of the chord length as the reference area; since airfoil chords are usually defined with a length of 1, the reference area is also 1. Aircraft use the wing area (or rotor-blade area) as the reference area, which makes for an easy comparison to lift. Airships and bodies of revolution use the volumetric coefficient of drag, in which the reference area is the square of the cube root of the airship's volume. Sometimes different reference areas are given for the same object in which case a drag coefficient corresponding to each of these different areas must be given. For sharp-cornered bluff bodies, like square cylinders and plates held transverse to the flow direction, this equation is applicable with the drag coefficient as a constant value when the Reynolds number is greater than 1000. For smooth bodies, like a circular cylinder, the drag coefficient may vary significantly until Reynolds numbers up to 10 (ten million). DiscussionThe equation is based on an idealized situation where all of the fluid impinges on the reference area and comes to a complete stop, building up stagnation pressure over the whole area. No real object exactly corresponds to this behavior. CD is the ratio of drag for any real object to that of the ideal object. In practice a rough unstreamlined body (a bluff body) will have a CD around 1, more or less. Smoother objects can have much lower values of CD. The equation is precise — it simply provides the definition of CD (drag coefficient), which varies with the Reynolds number and is found by experiment. Of particular importance is the u dependence on velocity, meaning that fluid drag increases with the square of velocity. When velocity is doubled, for example, not only does the fluid strike with twice the velocity, but twice the mass of fluid strikes per second. Therefore the change of momentum per second is multiplied by four. Force is equivalent to the change of momentum divided by time. This is in contrast with solid-on-solid friction, which generally has very little velocity dependence. DerivationThe drag equation may be derived to within a multiplicative constant by the method of dimensional analysis. If a moving fluid meets an object, it exerts a force on the object, according to a complicated (and not completely understood) law. We might suppose that the variables involved under some conditions to be the:
Using the algorithm of the Buckingham π theorem, one can reduce these five variables to two dimensionless parameters:
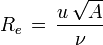
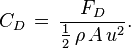
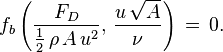
Alternatively, one can derive the dimensionless parameters via direct manipulation of the underlying differential equations. That this is so becomes obvious when the drag force FD is expressed as part of a function of the other variables in the problem: This rather odd form of expression is used because it does not assume a one-to-one relationship. Here, fa is some (as-yet-unknown) function that takes five arguments. We note that the right-hand side is zero in any system of units; so it should be possible to express the relationship described by fa in terms of only dimensionless groups. There are many ways of combining the five arguments of fa to form dimensionless groups, but the Buckingham π theorem states that there will be two such groups. The most appropriate are the Reynolds number, given by and the drag coefficient, given by Thus the function of five variables may be replaced by another function of only two variables: where fb is some function of two arguments. The original law is then reduced to a law involving only these two numbers. Because the only unknown in the above equation is the drag force FD, it is possible to express it as or
Thus the force is simply ½ ρ A u times some (as-yet-unknown) function fc of the Reynolds number Re — a considerably simpler system than the original five-argument function given above. Dimensional analysis thus makes a very complex problem (trying to determine the behavior of a function of five variables) a much simpler one: the determination of the drag as a function of only one variable, the Reynolds number. The analysis also gives other information for free, so to speak. We know that, other things being equal, the drag force will be proportional to the density of the fluid. This kind of information often proves to be extremely valuable, especially in the early stages of a research project. To empirically determine the Reynolds number dependence, instead of experimenting on huge bodies with fast-flowing fluids (such as real-size airplanes in wind-tunnels), one may just as well experiment on small models with slow-flowing, more viscous fluids, because these two systems are similar. See also
Text from Wikipedia is available under the Creative Commons Attribution/Share-Alike License; additional terms may apply.
Published in July 2009. Click here to read more articles related to aviation and space!
|

 |
|
Copyright 2004-2026 © by Airports-Worldwide.com, Vyshenskoho st. 36, Lviv 79010, Ukraine Legal Disclaimer |

 and with
and with 