|
 |
|
||||
|
By
Wikipedia,
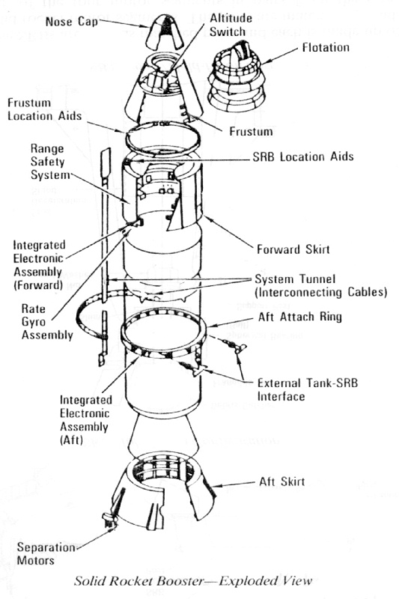
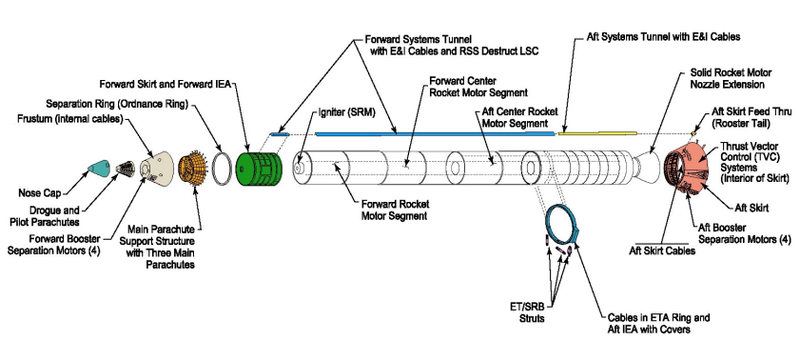
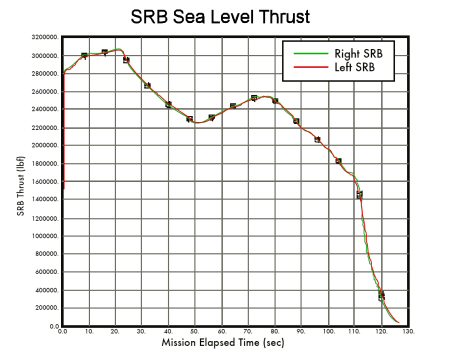
The Space Shuttle Solid Rocket Boosters (SRBs) are the pair of large solid rockets used by the space shuttle during the first two minutes of powered flight. They are located on either side of the orange external propellant tank. Each SRB produces 1.8 times more liftoff thrust than one F-1 engine, the most powerful single-chamber liquid-fueled rocket engine ever flown — 5 of which powered the Saturn V "moon rocket's" first stage. The SRBs are the largest solid-fuel rocket motors ever flown, and the first to be used for primary propulsion on human spaceflight missions. The spent SRBs are recovered from the ocean, refurbished, reloaded with propellant, and reused for several missions. The prime contactor for the SRBs and the manufacturer of the vital solid fuel rocket segments is the Thiokol Corporation of Brigham City, Utah. OverviewThe two reusable SRBs provide the main thrust to lift the shuttle off the launch pad and up to an altitude of about 150,000 ft (28 mi; 46 km). While on the pad, the two SRBs carry the entire weight of the external tank and orbiter and transmit the weight load through their structure to the mobile launch platform. Each booster has a liftoff thrust of approximately 2,800,000 pounds-force (12.5 MN) at sea level, increasing shortly after liftoff to about 3,100,000 lbf (13.8 MN). They are ignited after the three space shuttle main engines' thrust level is verified. Seventy five seconds after SRB separation, SRB apogee occurs at an altitude of approximately 220,000 ft (67 km); parachutes are then deployed and impact occurs in the ocean approximately 122 nautical miles (226 km) downrange, after which the two SRBs are recovered. The SRBs are the largest solid-propellant motors ever flown and the first of such large rockets designed for reuse. Each is 149.16 ft (45.46 m) long and 12.17 ft (3.71 m) in diameter. Each SRB weighs approximately 1,300,000 lb (590,000 kg) at launch. The two SRBs constitute about 60% of the total lift-off mass. The propellant for each solid rocket motor weighs approximately 1,100,000 lb (500,000 kg). The inert weight of each SRB is approximately 200,000 lb (91,000 kg). Primary elements of each booster are the motor (including case, propellant, igniter and nozzle), structure, separation systems, operational flight instrumentation, recovery avionics, pyrotechnics, deceleration system, thrust vector control system and range safety destruct system. While the terms 'solid rocket motor' and 'solid rocket booster' are often used interchangeably, in technical use they have specific meanings. 'Solid rocket booster' applies to the entire rocket assembly, which includes the recovery parachutes, electronic instrumentation, separation rockets, range safety destruct system, and thrust vector control. The term 'solid rocket motor' applies to the propellant, case, igniter and nozzle. Each booster is attached to the external tank at the SRB's aft frame by two lateral sway braces and a diagonal attachment. The forward end of each SRB is attached to the external tank at the forward end of the SRB's forward skirt. On the launch pad, each booster also is attached to the mobile launcher platform at the aft skirt by four frangible nuts that are severed at lift-off. The boosters are composed of seven individually manufactured steel segments. These are assembled in pairs by the manufacturer, and then shipped to KSC by rail for final assembly. The segments are fixed together using circumferential tang, clevis, and clevis pin fastening, and sealed with three O-rings (two prior to the Challenger Disaster in 1986) and heat-resistant putty. Components
Hold-down postsEach solid rocket booster has four hold-down posts that fit into corresponding support posts on the mobile launcher platform. Hold-down bolts hold the SRB and launcher platform posts together. Each bolt has a nut at each end, the top one being a frangible nut. The top nut contains two NASA standard detonators (NSDs), which are ignited at solid rocket motor ignition commands. When the two NSDs are ignited at each hold down, the hold-down bolt travels downward because of the release of tension in the bolt (pretensioned before launch), NSD gas pressure and gravity. The bolt is stopped by the stud deceleration stand, which contains sand. The SRB bolt is 28 in (710 mm) long and is 3.5 in (89 mm) in diameter. The frangible nut is captured in a blast container. In the event of a hold down failure the thrust from SRB ignition is enough to break the bolts, freeing the vehicle. The solid rocket motor ignition commands are issued by the orbiter's computers through the master events controllers to the hold-down pyrotechnic initiator controllers (PICs) on the mobile launcher platform. They provide the ignition to the hold-down NSDs. The launch processing system monitors the SRB hold- down PICs for low voltage during the last 16 seconds before launch. PIC low voltage will initiate a launch hold. Electrical power distributionElectrical power distribution in each SRB consists of orbiter supplied main DC bus power to each SRB via SRB buses labeled A, B and C. orbiter main DC buses A, B and C supply main DC bus power to corresponding SRB buses A, B and C. In addition, orbiter main DC bus C supplies backup power to SRB buses A and B, and orbiter bus B supplies backup power to SRB bus C. This electrical power distribution arrangement allows all SRB buses to remain powered in the event one orbiter main bus fails. The nominal operating voltage is 28±4 volts DC. Hydraulic power unitsThere are two self-contained, independent Hydraulic Power Units (HPUs) on each SRB. Each HPU consists of an auxiliary power unit (APU), fuel supply module, hydraulic pump, hydraulic reservoir and hydraulic fluid manifold assembly. The APUs are fueled by hydrazine and generate mechanical shaft power to drive a hydraulic pump that produces hydraulic pressure for the SRB hydraulic system. The two separate HPUs and two hydraulic systems are located on the aft end of each SRB between the SRB nozzle and aft skirt. The HPU components are mounted on the aft skirt between the rock and tilt actuators. The two systems operate from T minus 28 seconds until SRB separation from the orbiter and external tank. The two independent hydraulic systems are connected to the rock and tilt servoactuators. The HPU controller electronics are located in the SRB aft integrated electronic assemblies on the aft external tank attach rings. The HPUs and their fuel systems are isolated from each other. Each fuel supply module (tank) contains 22 lb (10.0 kg) of hydrazine. The fuel tank is pressurized with gaseous nitrogen at 400 psi (2.8 MPa), which provides the force to expel (positive expulsion) the fuel from the tank to the fuel distribution line, maintaining a positive fuel supply to the APU throughout its operation. In the APU, a fuel pump boosts the hydrazine pressure and feeds it to a gas generator. The gas generator catalytically decomposes the hydrazine into hot, high-pressure gas; a two-stage turbine converts this into mechanical power, driving a gearbox. The waste gas, now cooler and at low pressure, is passed back over the gas generator housing to cool it before being dumped overboard. The gearbox drives the fuel pump, its own lubrication pump, and the HPU hydraulic pump. As described so far, the system could not self-start, since the fuel pump is driven by the turbine it supplies fuel to. Accordingly, a bypass line goes around the pump and feeds the gas generator using the nitrogen tank pressure until the APU speed is such that the fuel pump outlet pressure exceeds that of the bypass line, at which point all the fuel is supplied to the fuel pump. When the APU speed reaches 100%, the APU primary control valve closes, and the APU speed is controlled by the APU controller electronics. If the primary control valve logic fails to the open state, the secondary control valve assumes control of the APU at 112% speed. Each HPU on an SRB is connected to both servoactuators on that SRB. One HPU serves as the primary hydraulic source for the servoactuator, and the other HPU serves as the secondary hydraulics for the servoactuator. Each servoactuator has a switching valve that allows the secondary hydraulics to power the actuator if the primary hydraulic pressure drops below 2,050 psi (14.1 MPa). A switch contact on the switching valve will close when the valve is in the secondary position. When the valve is closed, a signal is sent to the APU controller that inhibits the 100% APU speed control logic and enables the 112% APU speed control logic. The 100-percent APU speed enables one APU/HPU to supply sufficient operating hydraulic pressure to both servoactuators of that SRB. The APU 100-percent speed corresponds to 72,000 rpm, 110% to 79,200 rpm, and 112% to 80,640 rpm. The hydraulic pump speed is 3,600 rpm and supplies hydraulic pressure of 3,050 ± 50 psi (21.0 ± 0.34 MPa). A high pressure relief valve provides overpressure protection to the hydraulic system and relieves at 3,750 psi (25.9 MPa). The APUs/HPUs and hydraulic systems are reusable for 20 missions. Thrust vector controlEach SRB has two hydraulic gimbal servoactuators: one for roll and one for tilt. The servoactuators provide the force and control to gimbal the nozzle for thrust vector control. The space shuttle ascent thrust vector control portion of the flight control system directs the thrust of the three shuttle main engines and the two SRB nozzles to control shuttle attitude and trajectory during lift- off and ascent. Commands from the guidance system are transmitted to the ATVC (Ascent Thrust Vector Control) drivers, which transmit signals proportional to the commands to each servoactuator of the main engines and SRBs. Four independent flight control system channels and four ATVC channels control six main engine and four SRB ATVC drivers, with each driver controlling one hydraulic port on each main and SRB servoactuator. Each SRB servoactuator consists of four independent, two- stage servovalves that receive signals from the drivers. Each servovalve controls one power spool in each actuator, which positions an actuator ram and the nozzle to control the direction of thrust. The four servovalves in each actuator provide a force summed majority voting arrangement to position the power spool. With four identical commands to the four servovalves, the actuator force-sum action prevents a single erroneous command from affecting power ram motion. If the erroneous command persists for more than a predetermined time, differential pressure sensing activates a selector valve to isolate and remove the defective servovalve hydraulic pressure, permitting the remaining channels and servovalves to control the actuator ram spool. Failure monitors are provided for each channel to indicate which channel has been bypassed. An isolation valve on each channel provides the capability of resetting a failed or bypassed channel. Each actuator ram is equipped with transducers for position feedback to the thrust vector control system. Within each servoactuator ram is a splashdown load relief assembly to cushion the nozzle at water splashdown and prevent damage to the nozzle flexible bearing. Rate gyro assembliesEach SRB contains two Rate gyro assemblies (RGAs), with each RGA containing one pitch and one yaw gyro. These provide an output proportional to angular rates about the pitch and yaw axes to the orbiter computers and guidance, navigation and control system during first-stage ascent flight in conjunction with the orbiter roll rate gyros until SRB separation. At SRB separation, a switchover is made from the SRB RGAs to the orbiter RGAs. The SRB RGA rates pass through the orbiter flight aft multiplexers/demultiplexers to the orbiter GPCs. The RGA rates are then mid-value-selected in redundancy management to provide SRB pitch and yaw rates to the user software. The RGAs are designed for 20 missions. PropellantThe propellant mixture in each SRB motor consists of ammonium perchlorate (oxidizer, 69.6% by weight), aluminum (fuel, 16%), iron oxide (a catalyst, 0.4%), a polymer (such as PBAN or HTPB, serving as a binder that holds the mixture together and acting as secondary fuel, 12.04%), and an epoxy curing agent (1.96%). This propellant is commonly referred to as Ammonium Perchlorate Composite Propellant, or simply APCP. This mixture develops a specific impulse of 242 seconds at sea level or 268 seconds in a vacuum. The main fuel, aluminum is used because it has a reasonable specific energy density of about 31.0MJ/kg, but having a high volumetric energy density, as well as being difficult to accidentally ignite. The propellant is an 11-point star-shaped perforation in the forward motor segment and a double-truncated-cone perforation in each of the aft segments and aft closure. This configuration provides high thrust at ignition and then reduces the thrust by approximately a third 50 seconds after lift-off to avoid overstressing the vehicle during maximum dynamic pressure (Max Q). Function
IgnitionSRB ignition can occur only when a manual lock pin from each SRB safe and arm device has been removed. The ground crew removes the pin during prelaunch activities. At T minus five minutes, the SRB safe and arm device is rotated to the arm position. The solid rocket motor ignition commands are issued when the three Space Shuttle Main Engines (SSMEs) are at or above 90-percent rated thrust, no SSME fail and/or SRB ignition Pyrotechnic Initiator Controller (PIC) low voltage is indicated and there are no holds from the Launch Processing System (LPS). The solid rocket motor ignition commands are sent by the orbiter computers through the Master Events Controllers (MECs) to the safe and arm device NSDs in each SRB. A PIC single-channel capacitor discharge device controls the firing of each pyrotechnic device. Three signals must be present simultaneously for the PIC to generate the pyro firing output. These signals — arm, fire 1 and fire 2 — originate in the orbiter general-purpose computers (GPEs) and are transmitted to the MECs. The MECs reformat them to 28 volt DC signals for the PICs. The arm signal charges the PIC capacitor to 40 volts DC (minimum of 20 volts DC). The GPC launch sequence also controls certain critical main propulsion system valves and monitors the engine ready indications from the SSMEs. The MPS start commands are issued by the onboard computers at T minus 6.6 seconds (staggered start engine three, engine two, engine one all approximately within 0.25 of a second), and the sequence monitors the thrust buildup of each engine. All three SSMEs must reach the required 90% thrust within three seconds; otherwise, an orderly shutdown is commanded and safing functions are initiated. Normal thrust buildup to the required 90% thrust level will result in the SSMEs being commanded to the lift off position at T minus three seconds as well as the fire 1 command being issued to arm the SRBs. At T minus three seconds, the vehicle base bending load modes are allowed to initialize (movement of approximately 25.5 in (650 mm) measured at the tip of the external tank, with movement towards the external tank). The fire 2 commands cause the redundant NSDs to fire through a thin barrier seal down a flame tunnel. This ignites a pyro booster charge, which is retained in the safe and arm device behind a perforated plate. The booster charge ignites the propellant in the igniter initiator; and combustion products of this propellant ignite the solid rocket motor initiator, which fires down the entire vertical length of the solid rocket motor igniting the solid rocket motor propellant along its entire surface area instantaneously. At T minus zero, the two SRBs are ignited, under command of the four onboard computers; separation of the four explosive bolts on each SRB is initiated; the two T-0 umbilicals (one on each side of the spacecraft) are retracted; the onboard master timing unit, event timer and mission event timers are started; the three SSMEs are at 100%; and the ground launch sequence is terminated. The solid rocket motor thrust profile is tailored to reduce thrust during the maximum dynamic pressure region; the propellant begins as a star profile, which progressively burns away to a circular profile, the latter having a lower surface area, and thus providing a thrust reduction. SeparationSRB separation is initiated when the three solid rocket motor chamber pressure transducers are processed in the redundancy management middle value select and the head-end chamber pressure of both SRBs is less than or equal to 50 psi (340 kPa). A backup cue is the time elapsed from booster ignition. The separation sequence is initiated, commanding the thrust vector control actuators to the null position and putting the main propulsion system into a second-stage configuration (0.8 second from sequence initialization), which ensures the thrust of each SRB is less than 100,000 lbf (440 kN). Orbiter yaw attitude is held for four seconds, and SRB thrust drops to less than 60,000 lbf (270 kN). The SRBs separate from the external tank within 30 milliseconds of the ordnance firing command. The forward attachment point consists of a ball (SRB) and socket (External Tank (ET)) held together by one bolt. The bolt contains one NSD pressure cartridge at each end. The forward attachment point also carries the range safety system cross-strap wiring connecting each SRB RSS and the ET RSS with each other. The aft attachment points consist of three separate struts: upper, diagonal and lower. Each strut contains one bolt with an NSD pressure cartridge at each end. The upper strut also carries the umbilical interface between its SRB and the external tank and on to the orbiter. There are four booster separation motors on each end of each SRB. The BSMs separate the SRBs from the external tank. The solid rocket motors in each cluster of four are ignited by firing redundant NSD pressure cartridges into redundant confined detonating fuse manifolds. The separation commands issued from the orbiter by the SRB separation sequence initiate the redundant NSD pressure cartridge in each bolt and ignite the BSMs to effect a clean separation. Range safety systemA range safety system (RSS) provides for destruction of a rocket or part of it with on-board explosives by remote command if the rocket is out of control, in order to limit the danger to people on the ground from crashing pieces, explosions, fire, poisonous substances, etc. The RSS on the SRBs were activated 37 seconds after the breakup of the vehicle during the Space Shuttle Challenger disaster. The shuttle vehicle has two RSSs, one in each SRB. Both are capable of receiving two command messages (arm and fire) transmitted from the ground station. The RSS is used only when the shuttle vehicle violates a launch trajectory red line. An RSS consists of two antenna couplers, command receivers/decoders, a dual distributor, a safe and arm device with two NASA standard detonators (NSD), two confined detonating fuse manifolds (CDF), seven CDF assemblies and one linear-shaped charge (LSC). The antenna couplers provide the proper impedance for radio frequency and ground support equipment commands. The command receivers are tuned to RSS command frequencies and provide the input signal to the distributors when an RSS command is sent. The command decoders use a code plug to prevent any command signal other than the proper command signal from getting into the distributors. The distributors contain the logic to supply valid destruct commands to the RSS pyrotechnics. The NSDs provide the spark to ignite the CDF, which in turn ignites the LSC for shuttle vehicle destruction. The safe and arm device provides mechanical isolation between the NSDs and the CDF before launch and during the SRB separation sequence. The first message, called arm, allows the onboard logic to enable a destruct and illuminates a light on the flight deck display and control panel at the commander and pilot station. The second message transmitted is the fire command. The SRB distributors in the SRBs are cross-strapped together. Thus, if one SRB received an arm or destruct signal, the signal would also be sent to the other SRB. Electrical power from the RSS battery in each SRB is routed to RSS system A. The recovery battery in each SRB is used to power RSS system B as well as the recovery system in the SRB. The SRB RSS is powered down during the separation sequence, and the SRB recovery system is powered up. Descent and recovery
A command is sent from the orbiter to the SRB just before separation to apply battery power to the recovery logic network. A second, simultaneous command arms the three nose cap thrusters (for deploying the pilot and drogue parachutes), the frustum ring detonator (for main parachute deployment), and the main parachute disconnect ordinance. The recovery sequence begins with the operation of the high-altitude baroswitch, which triggers the pyrotechnic nose cap thrusters. This ejects the nose cap, which deploys the pilot parachute. Nose cap separation occurs at a nominal altitude of 15,704 ft (4,787 m), about 218 seconds after SRB separation. The 11.5 ft (3.5 m) diameter conical ribbon pilot parachute provides the force to pull lanyards attached to cut knives, which cut the loop securing the drogue retention straps. This allows the pilot chute to pull the drogue pack from the SRB, causing the drogue suspension lines to deploy from their stored position. At full extension of the twelve 105 ft (32 m) suspension lines, the drogue deployment bag is stripped away from the canopy, and the 54 ft (16 m) diameter conical ribbon drogue parachute inflates to its initial reefed condition. The drogue disreefs twice after specified time delays (using redundant 7 and 12-second reefing line cutters), and it reorients/stabilizes the SRB for main chute deployment. The drogue parachute has a design load of approximately 315,000 lb (143,000 kg) and weighs approximately 1,200 lb (540 kg). After the drogue chute has stabilized the SRB in a tail-first attitude, the frustum is separated from the forward skirt by a pyrotechnic charge triggered by the low-altitude baroswitch at a nominal altitude of 5,500 ft (1,700 m) about 243 seconds after SRB separation. The frustum is then pulled away from the SRB by the drogue chute. The main chute suspension lines are pulled out from deployment bags that remain in the frustum. At full extension of the lines, which are 203 ft (62 m) long, the three main chutes are pulled from their deployment bags and inflate to their first reefed condition. The frustum and drogue parachute continue on a separate trajectory to splashdown. After specified time delays (using redundant 10 and 17-second reefing line cutters), the main chute reefing lines are cut and the chutes inflate to their second reefed and full open configurations. The main chute cluster decelerates the SRB to terminal conditions. Each of the 136 ft (41 m) diameter, 20-degree conical ribbon parachutes have a design load of approximately 195,000 lb (88,000 kg) and each weighs approximately 2,180 lb (990 kg). These chutes are the largest that have ever been used — both in deployed size and load weight. The RSRM nozzle extension is severed by a pyrotechnic charge about 20 seconds after frustum separation. Water impact occurs about 279 seconds after SRB separation at a nominal velocity of 76 feet per second (23 m/s). The water impact range is approximately 130 nmi (240 km) off the eastern coast of Florida. Because the parachutes provide for a nozzle-first impact, air is trapped in the empty (burned out) motor casing, causing the booster to float with the forward end approximately 30 feet (9.1 m) out of the water.
Formerly, the main chutes were released from the SRB at impact using a parachute release nut ordnance system (residual loads in the main chutes would deploy the parachute attach fittings with floats tethered to each fitting). The current design keeps the main chutes attached during water impact (initial impact and slapdown). Salt Water Activated Release (SWAR) devices are now incorporated into the main chute riser lines to simplify recovery efforts and reduce damage to the SRB. The drogue deployment bag/pilot parachutes, drogue parachutes and frustums, each main chute, and the SRBs are buoyant and are recovered. Specially fitted NASA recovery ships, the Freedom Star and the Liberty Star, recover the SRBs and descent/recovery hardware. Once the boosters are located, the Diver Operated Plug (DOP) is maneuvered by divers into place to plug the SRB nozzle and dewater the motor case. Dewatering, pumping air into and water out of the SRB, causes the SRB to change from a nose-up floating position to a horizontal attitude more suitable for towing. The retrieval vessels then tow the boosters and other objects recovered back to Kennedy Space Center. Challenger disaster
The Challenger accident originated from one of the SRBs. The cause of the accident was found by the Rogers Commission Report to be due to faulty design of the SRB joints. During the subsequent downtime, detailed structural analyses were performed on critical structural elements of the SRB. Analyses were primarily focused in areas where anomalies had been noted during postflight inspection of recovered hardware. One of the areas was the attachment ring where the SRBs are connected to the external tank. Areas of distress were noted in some of the fasteners where the ring attaches to the SRB motor case. This situation was attributed to the high loads encountered during water impact. To correct the situation and ensure higher strength margins during ascent, the attach ring was redesigned to encircle the motor case completely (360 degrees). Previously, the attachment ring formed a 'C' shape and encircled the motor case just 270 degrees. Additionally, special structural tests were performed on the aft skirt. During this test program, an anomaly occurred in a critical weld between the hold-down post and skin of the skirt. A redesign was implemented to add reinforcement brackets and fittings in the aft ring of the skirt. These two modifications added approximately 450 lb (200 kg) to the weight of each SRB. The result is called a "Redesigned Solid Rocket Motor" (RSRM). ConstructionThe prime contractor for the SRB motors is ATK Launch System's Wasatch Division based in Brigham City, Utah. United Space Alliance's Solid Rocket Booster Element division is the prime contractor for SRB assembly, checkout and refurbishment for all non-solid-rocket-motor components and for SRB integration. Many other companies supply various components for the SRBs:
Advanced Solid Rocket BoosterNASA was planning on replacing the post-Challenger SRBs with a new Advanced Solid Rocket Booster (ASRB) to be built by NASA itself at a new facility, on the location of a canceled Tennessee Valley Authority nuclear power plant, at Yellow Creek, Mississippi. The ASRB would have produced additional force in order to increase shuttle payload, so that it could carry modules and construction components to the ISS. After an expenditure of over $2 billion USD, the ASRBs were canceled in favor of the "Super Light-weight Tank" (SLWT) that is in use now, replacing the light-weight tank design that was used on earlier flights. Two ASRB casings can be found on the Space Shuttle Pathfinder on display at the United States Space & Rocket Center in Huntsville, Alabama. Filament-wound casesIn the need to provide the necessary thrust to launch polar-orbiting shuttles from the SLC-6 launch pad at Vandenberg Air Force Base in California, SRBs using filament-wound cases (FWC) were designed to be more lightweight than the steel cases used on KSC-launched SRBs. Unlike the regular SRBs, which had the flawed field joint design that led to the Challenger Disaster in 1986, the FWC boosters had the "double tang" joint design (necessary to keep the boosters properly in alignment during the "twang" movement when the SSMEs are ignited prior to liftoff), but used the two O-ring seals. With the closure of SLC-6, the FWC boosters were scrapped by ATK and NASA, but their field joints, albeit modified to incorporate the current three O-ring seals and joint heaters, were later incorporated into the present-day field joints on the current SRMs. Five-segment boosterPrior to the destruction of the Space Shuttle Columbia in 2003, NASA investigated the replacement of the current 4-segment RSRMs with either a 5-segment SRB design or replacing them altogether with liquid "flyback" boosters using either Atlas V or Delta IV EELV technologies. The 5-segment SRB, which would have required little change to the current shuttle infrastructure, would have allowed the space shuttle to carry an additional 20,000 lb (9,100 kg) of payload in an International Space Station-inclination orbit, eliminate the dangerous "Return-to-Launch Site" and "Trans-Oceanic Abort" modes, and even fly polar-orbiting missions from Kennedy Space Center using a so-called "dog-leg" maneuver over the Atlantic Ocean. With the destruction of the Columbia, NASA has shelved the 5-segment SRB for the shuttle program, but resurrected it for the Ares I and Ares V boosters for Project Constellation. Future and proposed usesNASA plans to reuse the SRB designs and infrastructure in several Ares rockets. In 2005, NASA announced the Shuttle-Derived Launch Vehicle slated to carry the Orion Crew Exploration Vehicle into low-Earth orbit and later to the Moon. The SRB-derived Crew Launch Vehicle (CLV), named Ares I, originally featured a modified 4-segment SRB for its first stage, while a liquid-fueled second stage, powered by a single main engine, would have propelled the Orion into orbit. Its current design, initially introduced in 2006, and since modified, is to feature the originally planned, but scrapped 5-segment SRB first-stage, with a second stage powered by an Apollo-derived J-2X rocket engine. In place of the standard SRB nosecone, Ares I will have a tapered interstage assembly connecting the booster proper with the second stage, an inflatable ring to counter the end-over-end spinning, and larger, heavier parachutes to lower the stage into the Atlantic Ocean for recovery. Also introduced in 2005, was a heavy-lift Cargo Launch Vehicle (CaLV) named Ares V. Early designs of the Ares V utilized five SSMEs and a pair of 5-segment boosters like those planned for the pre-Columbia upgrades, but since then NASA had redesigned the vehicle using first five, and now six RS-68B rocket engines, with either the originally-planned 5-segment boosters or a pair of 5.5-segment boosters (similar to the 5.5-segment booster configuration on the now-retired Titan 34-D/Centaur rocket used to launch the Viking and Voyager spacecrafts in the mid-1970s). The current redesign will make the booster taller and more powerful than the now-retired Saturn V, N-1, and Energia rockets, and will allow the Ares V to place both the Earth Departure Stage and Altair spacecraft into Low-Earth orbit for later on-orbit assembly. Unlike the 5-segment SRB for the Ares I, the 5 or 5.5-segment boosters for the Ares V are to be identical in design, construction, and function to the current SRBs except for the extra segments. Although there is no final decision on the recovery or reuse of this system, but it is most likely that the standard recovery process like that employed on the shuttle will be used. Like the current shuttle boosters, the Ares V boosters will fly an almost-identical flight trajectory from launch to splashdown. The DIRECT proposal for a new, shuttle-derived launch vehicle, unlike the Ares I and Ares V boosters, uses a pair of classic 4-segment SRBs with the existing RS-68 engines used on the Delta IV EELV rocket. See alsoA significant portion of this article was created by NASA and was taken from a NASA website or publication. All such works are in the public domain, with the exception of the usage-restricted NASA logo, because works of the U.S. federal government cannot be copyrighted. For more information, please refer to the NASA copyright policy page. External links
Text from Wikipedia is available under the Creative Commons Attribution/Share-Alike License; additional terms may apply.
Published in July 2009. Click here to read more articles related to aviation and space!
|

 |
|
Copyright 2004-2024 © by Airports-Worldwide.com, Vyshenskoho st. 36, Lviv 79010, Ukraine Legal Disclaimer |