|
 |
|
||||
|
By
Wikipedia,
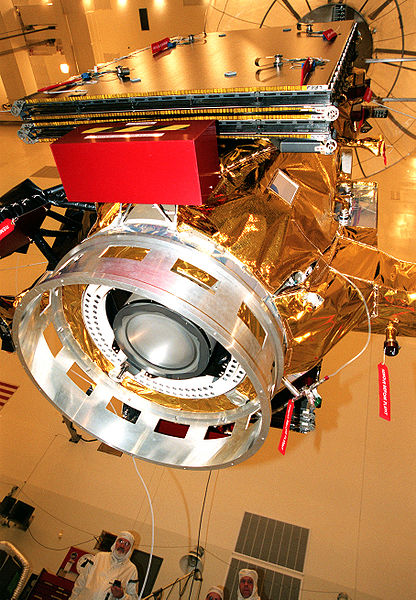
Deep Space 1 (DS1) of the NASA New Millennium Program is a spacecraft dedicated to testing its payload of advanced, high risk technologies. Launched on 24 October 1998, three of twelve technologies on board had to work within a few minutes of separation from the carrier rocket for the mission to continue. The Deep Space series was continued by the Deep Space 2 probes, which were launched in January 1999 on Mars Polar Lander and were intended to strike the surface of Mars. Technologies
NSTARThe NSTAR electrostatic ion thruster, developed at NASA's Glenn Research Center, achieves a specific impulse of one to three thousand seconds. This is an order of magnitude higher than traditional space propulsion methods, resulting in a mass savings of approximately half. This leads to much cheaper launch vehicles. Although the engine produces just 92 millinewtons (0.331 ounce-force) thrust at maximum power, the craft achieved high speeds because ion engines thrust continuously for long periods. The engine fired for 678 total days, a record for such engines. The next spacecraft to use NSTAR engines is the Dawn Mission, with three redundant units. SCARLETPowering the engine are the Solar Concentrator Array of Refractive Linear Element Technologies (SCARLET) solar arrays, also developed at NASA Glenn. These use linear Fresnel lenses made of silicone to concentrate sunlight onto solar cells. Combined with more efficient, dual-junction cells, the SCARLET arrays generate 2.5 kilowatts with less size and weight than conventional arrays. AutonavThe Autonav system, developed by NASA's Jet Propulsion Laboratory, takes images of known bright asteroids. The asteroids in the inner Solar System move in relation to other bodies at a noticeable, predictable speed. Thus a spacecraft can determine its relative position by tracking such asteroids across the star background, which appears fixed over such timescales. Two or more asteroids let the spacecraft triangulate its position; two or more positions in time let the spacecraft determine its trajectory. Existing spacecraft are tracked by their interactions with the transmitters of the Deep Space Network (DSN), in effect an inverse GPS. However, DSN tracking requires many skilled operators, and the DSN is overburdened by its use as a communications network. The use of Autonav reduces mission cost and DSN demands. The Autonav system can also be used in reverse, tracking the position of bodies relative to the spacecraft. This is used to acquire targets for the scientific instruments. The spacecraft is programmed with the target's coarse location. After initial acquisition, Autonav keeps the subject in frame, even commandeering the spacecraft's attitude control. The next spacecraft to use Autonav was Deep Impact. Remote AgentRemote Agent (remote intelligent self-repair software)(RAX), developed at NASA Ames Research Center and JPL, was the first artificial intelligence control system to control a spacecraft without human supervision. Remote Agent successfully demonstrated the ability to plan onboard activities and correctly diagnose and respond to simulated faults in spacecraft components. Autonomous control will enable future spacecraft to operate at greater distances from Earth, and to carry out more sophisticated science-gathering activities in deep space. Components of the Remote Agent software have been used to support other NASA Missions. Major components of Remote Agent were a robust planner (EUROPA), and a model-based diagnostic system (Livingstone). EUROPA was used as a ground-based planner for the Mars Exploration Rovers, and EUROPA II is being used to support the Phoenix Lander and the upcoming Mars Science Laboratory. Livingstone2 was flown onboard Earth Observing 1, and an F-18 at NASA Dryden Flight Research Center. Beacon MonitorAnother method for reducing DSN burdens is the Beacon Monitor experiment. During the long cruise periods of the mission, spacecraft operations are essentially suspended. Instead of data, the craft emits a carrier signal on a predetermined frequency. Without data decoding, the carrier can be detected by much simpler ground antennas and receivers. If the spacecraft detects an anomaly, it changes the carrier between four tones, based on urgency. Ground receivers then signal operators to divert DSN resources. This prevents skilled operators and expensive hardware from babysitting an unburdened mission operating nominally. A similar system is used on the New Horizons Pluto probe to keep costs down during its ten-year cruise from Jupiter to Pluto. SDSTThe SDST (Small Deep-Space Transponder), a compact radio communications system. Aside from using miniaturized components, the SDST is capable of communicating over the Ka band. Because this band is higher in frequency than bands currently in use by deep-space missions, the same amount of data can be sent by smaller equipment in space and on the ground. Conversely, existing DSN antennas can split time among more missions. At the time of launch, the DSN had a small number of Ka receivers installed on an experimental basis; Ka operations and missions are increasing. PEPEOnce at a target, DS1 senses the particle environment with the PEPE (Plasma Experiment for Planetary Exploration) instrument. It maps the objects with the MICAS (Miniature Integrated Camera And Spectrometer) imaging channel, and discerns chemical composition with infrared and ultraviolet channels. All channels share a 10 cm telescope, which uses a silicon carbide mirror. OtherOther, secondary technologies are built in, at the component level, and in the spacecraft built by Spectrum Astro. Achievements
The ion propulsion engine initially failed after 4.5 minutes of operation. However, it was later restored to action and performed excellently. Early in the mission, material ejected during launch vehicle separation can cause the closely-spaced ion extraction grids to short. The contamination was eventually cleared, as the material was eroded by arcs, sublimed by outgassing, or simply allowed to drift out. This was achieved by repeatedly restarting the engine, arcing across trapped material. It was thought that the ion exhaust might interfere with other spacecraft systems, such as radio communications or the science instruments. The PEPE detectors had a secondary function to monitor such effects from the engine. No interference was found. Another failure was the loss of the star tracker. The star tracker determines spacecraft orientation by comparing the star field to its internal charts. The mission was saved when the MICAS camera was reprogrammed to stand in for the star tracker. Although MICAS is more sensitive, its field-of-view is an order of magnitude smaller, creating a higher processing burden. Ironically, the star tracker was an off-the-shelf component, expected to be highly reliable. Without a working star tracker, ion thrusting was temporarily suspended. The loss of thrust time forced the cancellation of a flyby past Comet Wilson-Harrington. The Autonav system required occasional manual corrections, mostly for problems with identifying objects that were not bright enough or were difficult to identify because of the interference of light. Objects within the field generated spurious reflections into the instrument. The Remote Agent system was presented with three simulated failures on the spacecraft and correctly handled each event.
The MICAS instrument was a design success, but the ultraviolet channel failed due to an electrical fault. No usable data was returned. The flyby of Braille was only a partial success. Deep Space 1 was intended to perform the flyby at 56,000 km/h at only 240 meters from the asteroid. Due to technical difficulties, including a software crash shortly before approach, the craft instead passed Braille at a distance of 26 km. This, plus Braille's lower albedo, meant that the asteroid was not bright enough for the autonav to focus the camera in the right direction, and the picture shoot was delayed by almost an hour. The resulting pictures were disappointingly indistinct. However, the flyby of Comet Borrelly was a great success and returned extremely detailed images of the comet's surface. Such images were of higher resolution than the only previous pictures, of Halley's Comet taken by the Giotto spacecraft. The PEPE instrument reported that the comet's fields were offset from the nucleus. This is believed to be due to emission of jets, which were not distributed evenly across the comet's surface. Despite having no debris shields, the DS1 spacecraft survived the comet passage intact. Once again, the sparse comet jets did not appear to point towards the spacecraft. The spacecraft eventually ran out of hydrazine fuel for its attitude control thrusters. Fortunately, the highly efficient ion thruster had a sufficient amount of propellant left to perform attitude control, in addition to its responsibility as main propulsion, thus allowing the mission to continue. Current statusDeep Space 1 succeeded in its primary and secondary objectives including flybys of the asteroid Braille and of Comet Borrelly, returning valuable science data and images. Though on-board communications are yet active, DS1's ion engines were shut down on 18 December 2001 at approximately 20:00:00 UTC signaling the end of the mission. Statistics
External links
Text from Wikipedia is available under the Creative Commons Attribution/Share-Alike License; additional terms may apply.
Published in July 2009. Click here to read more articles related to aviation and space!
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 |
|
Copyright 2004-2026 © by Airports-Worldwide.com, Vyshenskoho st. 36, Lviv 79010, Ukraine Legal Disclaimer |